Android R Vsync相关梳理
为了理解systrace中HW Vsync, sf vsync, app vsync的含义和作用。这里主要参照Android R AOSP源码对这几种VSYNC的关系和调用流程进行大致的梳理。
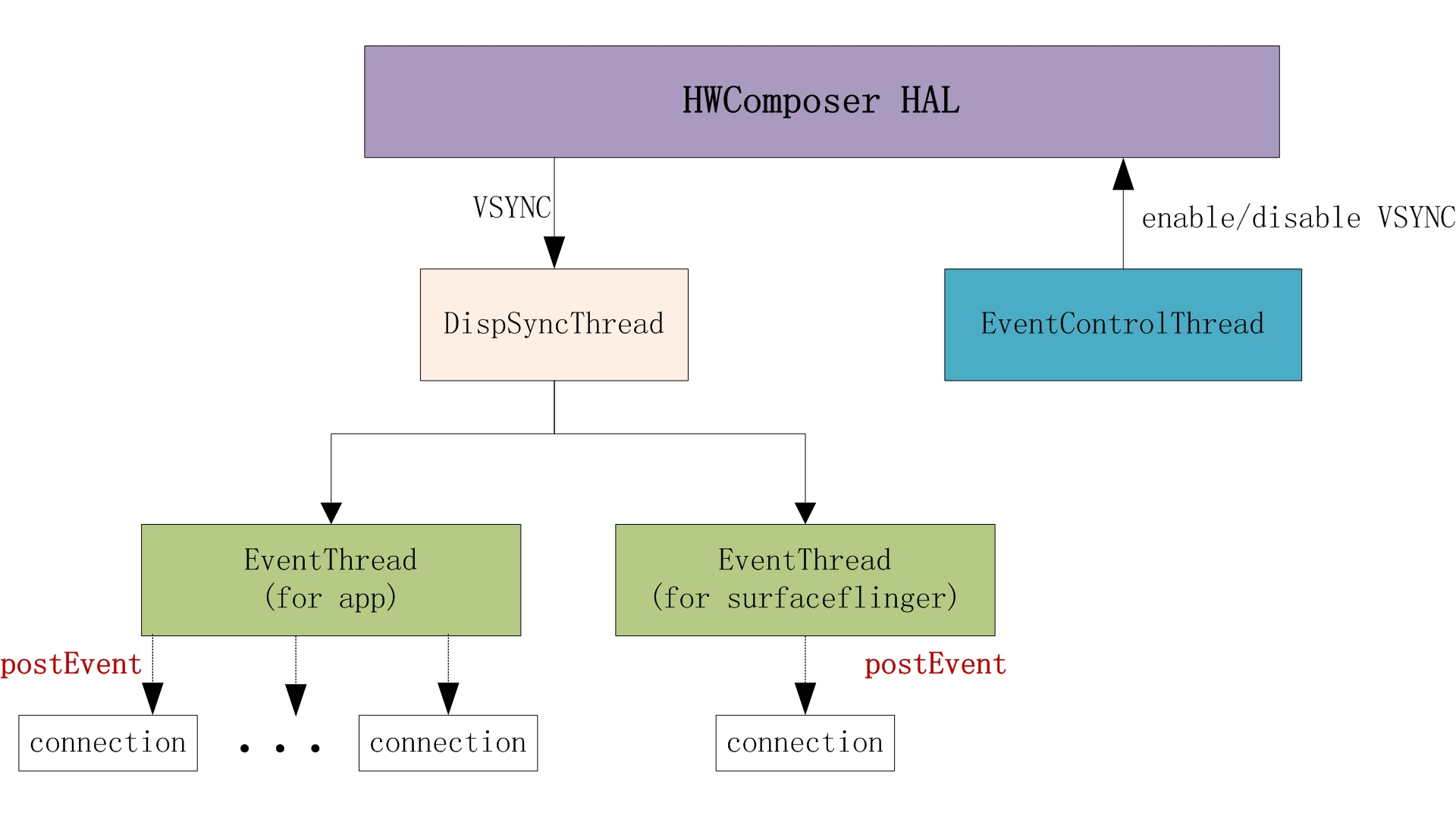
1. vsync相关线程
- EventControlThread: 控制硬件vsync的开关
- DispSyncThread: 软件产生vsync的线程,接收HWComposer HAL的VSYNC信号,并分发给EventThread
- SF EventThread: 该线程用于SurfaceFlinger接收vsync信号用于渲染
- App EventThread: 该线程用于接收vsync信号并且上报给App进程,App开始绘制
1.1. 四种vsync
从这4个线程,可以将vsync分为4种不同的类型:
- HW vsync, 真实由硬件产生的vsync信号
- SW vsync, 由DispSync产生的vsync信号
- SF vsync, SF接收到的vsync信号
- App vsync, App接收到的vsync信号
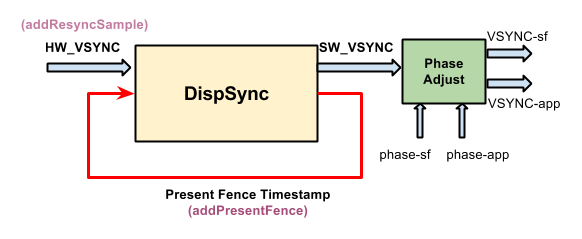
1.2. 硬件vsync
HWComposer HAL通过callback函数,把VSYNC信号传给DispSyncThread,DispSyncThread传给EventThread
1.3. 函数调用总流程图
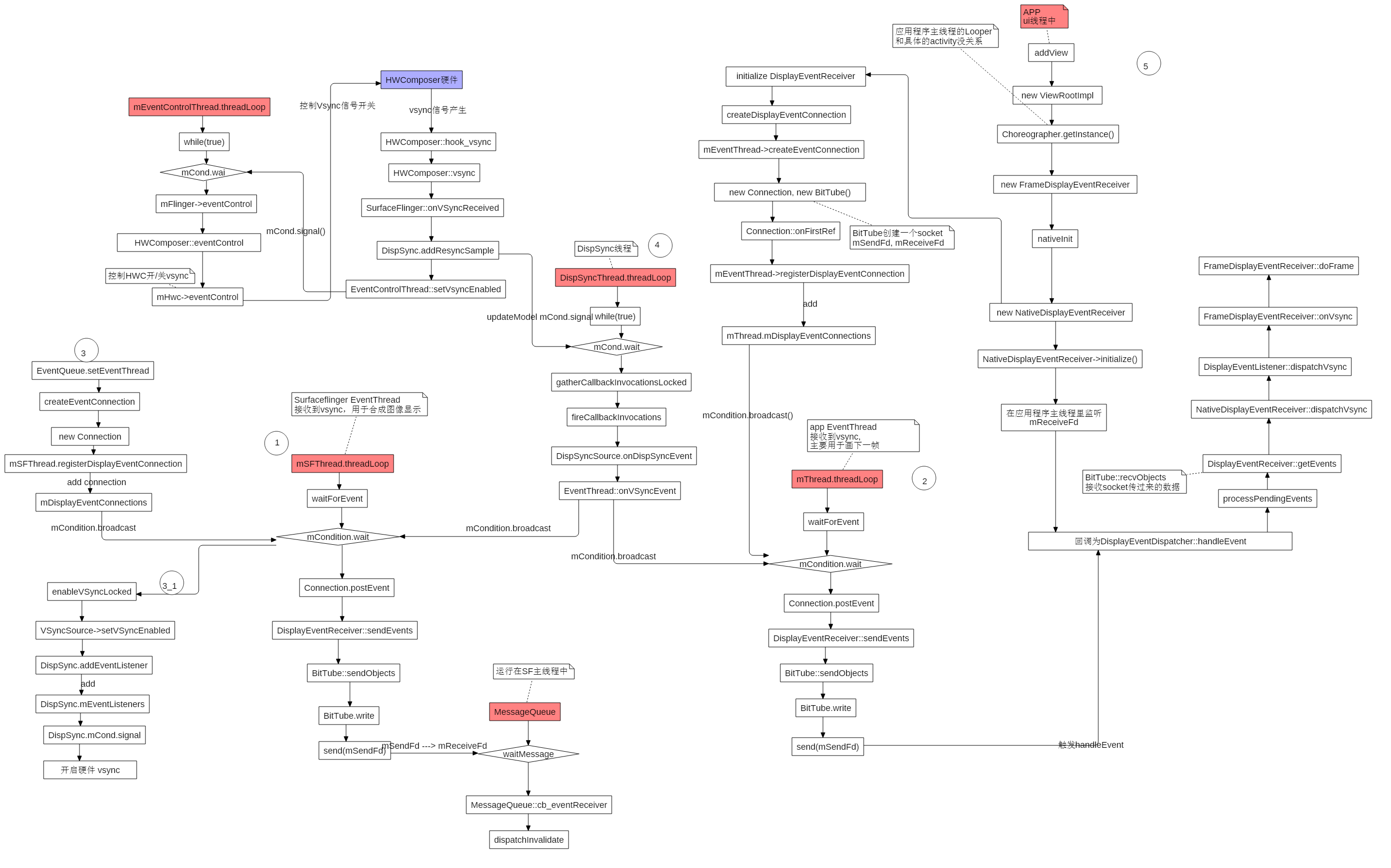
部分流程:
SurfaceFlinger::init() ---->
SurfaceFlinger::processDisplayHotplugEventsLocked() ---->
SurfaceFlinger::initScheduler 创建sf thread和app thread ---->
(1)Scheduler::createConnection ---->
Scheduler::createConnectionInternal ---->
EventThread::createEventConnection [new EventThreadConnection创建对象]
(2)MessageQueue::setEventConnection ---->
(2.1) mEventTube.getFd()
(2.2) stealReceiveChannel
(2.3) MessageQueue::cb_eventReceiver ---->
MessageQueue::eventReceiver [接收Vsync信号] ---->
MessageQueue::Handler::dispatchInvalidate [Handler消息处理]---->
MessageQueue::Handler::handleMessage ---->
SurfaceFlinger::onMessageReceived ---->
SurfaceFlinger::onMessageInvalidate ----->
//合成刷新是通过frameAvailableListener->onFrameAvailable(item)触发
SurfaceFlinger::signalLayerUpdate() 请求合成 ---->
MessageQueue::invalidate() ----->
EventThreadConnection::requestNextVsync()
1.4. SF创建EventThread(app&sf)
//函数SurfaceFlinger::initScheduler
// start the EventThread,调用setVsyncEnabled函数控制硬件Vysnc
mScheduler =
getFactory().createScheduler([this](bool enabled) { setVsyncEnabled(enabled); },
*mRefreshRateConfigs, *this);
mAppConnectionHandle =
mScheduler->createConnection("app", mPhaseConfiguration->getCurrentOffsets().late.app,
impl::EventThread::InterceptVSyncsCallback());
mSfConnectionHandle =
mScheduler->createConnection("sf", mPhaseConfiguration->getCurrentOffsets().late.sf,
[this](nsecs_t timestamp) {
mInterceptor->saveVSyncEvent(timestamp);
});
1.5. SF注册Connection
//frameworks/native/services/surfaceflinger/Scheduler/EventThread.cpp
EventThreadConnection::EventThreadConnection(EventThread* eventThread,
ResyncCallback resyncCallback,
ISurfaceComposer::ConfigChanged configChanged)
: resyncCallback(std::move(resyncCallback)),
mConfigChanged(configChanged),
mEventThread(eventThread),
mChannel(gui::BitTube(8 * 1024 /* default size is 4KB, double it */)) {}
void EventThreadConnection::onFirstRef() {
// NOTE: mEventThread doesn't hold a strong reference on us
mEventThread->registerDisplayEventConnection(this);
}
status_t EventThread::registerDisplayEventConnection(const sp<EventThreadConnection>& connection) {
std::lock_guard<std::mutex> lock(mMutex);
// this should never happen
auto it = std::find(mDisplayEventConnections.cbegin(),
mDisplayEventConnections.cend(), connection);
if (it != mDisplayEventConnections.cend()) {
ALOGW("DisplayEventConnection %p already exists", connection.get());
mCondition.notify_all();
return ALREADY_EXISTS;
}
//添加到mDisplayEventConnections集合中
mDisplayEventConnections.push_back(connection);
//唤醒threadMain函数(唤醒所有等待队列中阻塞的线程,存在锁争用,只有一个线程能够获得锁)
mCondition.notify_all();
return NO_ERROR;
}
Note: 有关notify_all和unique_lock<std::mutex>锁可参考:C++11条件变量:notify_one()与notify_all()的区别
2. sf请求vsync
两条请求vsync的流程:
-
参考signalLayerUpdate通知Layer更新信息开始,SF触发合成开始请求VSYNC
-
当显示屏准备完毕,SF EventThread connection开始监听Vsync信号,相关流程:
SurfaceFlinger::init() ---->
SurfaceFlinger::initializeDisplays() 设置初始条件 ----->
SurfaceFlinger::onInitializeDisplays() ----->
SurfaceFlinger::setTransactionState ---->
SurfaceFlinger::setTransactionFlags ---->
SurfaceFlinger::signalTransaction() ---->
MessageQueue::invalidate() [在请求刷新合成时也会调用] ----->
EventThread::requestNextVsync
2.1. EventThread线程唤醒函数threadmain
部分代码:
//frameworks/native/services/surfaceflinger/Scheduler/EventThread.cpp
void EventThread::requestNextVsync(const sp<EventThreadConnection>& connection) {
if (connection->resyncCallback) {
connection->resyncCallback();
}
std::lock_guard<std::mutex> lock(mMutex);
if (connection->vsyncRequest == VSyncRequest::None) { //None=-1
connection->vsyncRequest = VSyncRequest::Single; //Single=0,只接收一次信号
mCondition.notify_all(); //唤醒threadmain函数
}
}
- 在threadmain函数其中创建了DisplayEventReceiver对象,该类用于传输VSYNC信号。
DisplayEventReceiver::DisplayEventReceiver (MessageQueue::setEventConnection) ---->
EventThreadConnection::stealReceiveChannel ----->
//函数MessageQueue::setEventConnection也会调用到此处
status_t EventThreadConnection::stealReceiveChannel(gui::BitTube* outChannel) {
outChannel->setReceiveFd(mChannel.moveReceiveFd());
return NO_ERROR;
}
- 调用DispSyncSource.setVSyncEnabled开启硬件Vsync
2.2. BitTube
BitTube,其实现是socketpairt套接字,用于传递消息。Buffer大小是4K
2.3. DisplayEventReceiver
查看该类的头文件,关于vsync的主要函数作用:
//frameworks/native/libs/gui/include/gui/DisplayEventReceiver.h
public:
//DisplayEventReceiver创建并注册了SF的一个事件连接,默认禁止VSync
//通过调用setVSyncRate、requestNextVsync开始接受。其他事件则即刻分发
explicit DisplayEventReceiver(
ISurfaceComposer::VsyncSource vsyncSource = ISurfaceComposer::eVsyncSourceApp,
ISurfaceComposer::ConfigChanged configChanged =
ISurfaceComposer::eConfigChangedSuppress);
//获取用于接收事件的文件描述符,该描述符由本类持有,不得关闭
int getFd() const;
//从队列中读取事件并返回事件个数如果返回NOT_ENOUGH_DATA
//如果返回的数据不够多,则对象将永远无效,应该销毁,并且不应该再次调用getEvents
ssize_t getEvents(Event* events, size_t count);
static ssize_t getEvents(gui::BitTube* dataChannel, Event* events, size_t count);
//向队列中写入事件并返回写入的数量
static ssize_t sendEvents(gui::BitTube* dataChannel, Event const* events, size_t count);
//设置VSync分发频率,每次VSync事件返回1,其他事件返回2,没有事件返回0
status_t setVsyncRate(uint32_t count);
//请求下一次Vsync
status_t requestNextVsync();
//强制请求当前primary display的config属性
status_t requestLatestConfig();
private:
sp<IDisplayEventConnection> mEventConnection;
std::unique_ptr<gui::BitTube> mDataChannel;
};
2.4. DispSyncSource.setVSyncEnabled开启硬件Vsync
流程:
EventThread::threadMain ----->
DispSyncSource::setVSyncEnabled ---->
surfaceflinger/Scheduler/DispSync.cpp -- DispSync::addEventListener ---->
class DispSyncThread : public Thread -- addEventListener
//surfaceflinger/Scheduler/EventThread.cpp
void EventThread::threadMain(std::unique_lock<std::mutex>& lock) {
.....
State nextState;
if (mVSyncState && vsyncRequested) {
nextState = mVSyncState->synthetic ? State::SyntheticVSync : State::VSync;
} else {
ALOGW_IF(!mVSyncState, "Ignoring VSYNC request while display is disconnected");
nextState = State::Idle;
}
if (mState != nextState) {
if (mState == State::VSync) {
mVSyncSource->setVSyncEnabled(false);
} else if (nextState == State::VSync) {
mVSyncSource->setVSyncEnabled(true);
}
mState = nextState;
}
....
}
//surfaceflinger/Scheduler/DispSyncSource.cpp
void DispSyncSource::setVSyncEnabled(bool enable) {
std::lock_guard lock(mVsyncMutex);
if (enable) {
//开启硬件Vsync信号就是添加EventListener
status_t err = mDispSync->addEventListener(mName, mPhaseOffset,
static_cast<DispSync::Callback*>(this),
mLastCallbackTime);
} else {
status_t err = mDispSync->removeEventListener(static_cast<DispSync::Callback*>(this),
&mLastCallbackTime);
if (mDolphinCheck) {
if (mDolphinCheck(mName)) {
status_t err = mDispSync->addEventListener(mName, mPhaseOffset,
static_cast<DispSync::Callback*>(this),
mLastCallbackTime);
if (err != NO_ERROR) {
ALOGE("error registering vsync callback: %s (%d)", strerror(-err), err);
}
}
}
}
mEnabled = enable;
}
3. 硬件VSYNC从HWComposer HAL发到EventThread
SF请求合成时关于Vsync的部分流程:
SurfaceFlinger::onMessageInvalidate ---->
SurfaceFlinger::updateFrameScheduler() ----->
(1) SurfaceFlinger::getVsyncPeriod() ---->
surfaceflinger/DisplayHardware/HWC2.cpp -- Display::getDisplayVsyncPeriod
(2) Scheduler::resyncToHardwareVsync
(3) DispSync::addResyncSample ----->
DispSync::updateModelLocked [开始计算更新SW vsync 模型]
3.1. mPeriod Vsync周期时长值变更流程
流程:
SurfaceFlinger::init() ---->
SurfaceFlinger::initializeDisplays() 设置初始条件 ----->
SurfaceFlinger::onInitializeDisplays() ----->
SurfaceFlinger::setPowerModeInternal 设置Display的power mode ----->
(1) Scheduler::onScreenAcquired
(2) Scheduler::resyncToHardwareVsync 通过硬件Vsync重新设置软件vysnc ----->
Scheduler::setVsyncPeriod 设置vsync周期时长 ----->
(1) DispSync::setPeriod
(2) DispSync::beginResync()
(3) EventControlThread::setVsyncEnabled 唤醒threadmain线程[如果硬件vsync没有enable,那么就通知EventControlThread去通知硬件enable VSYNC]
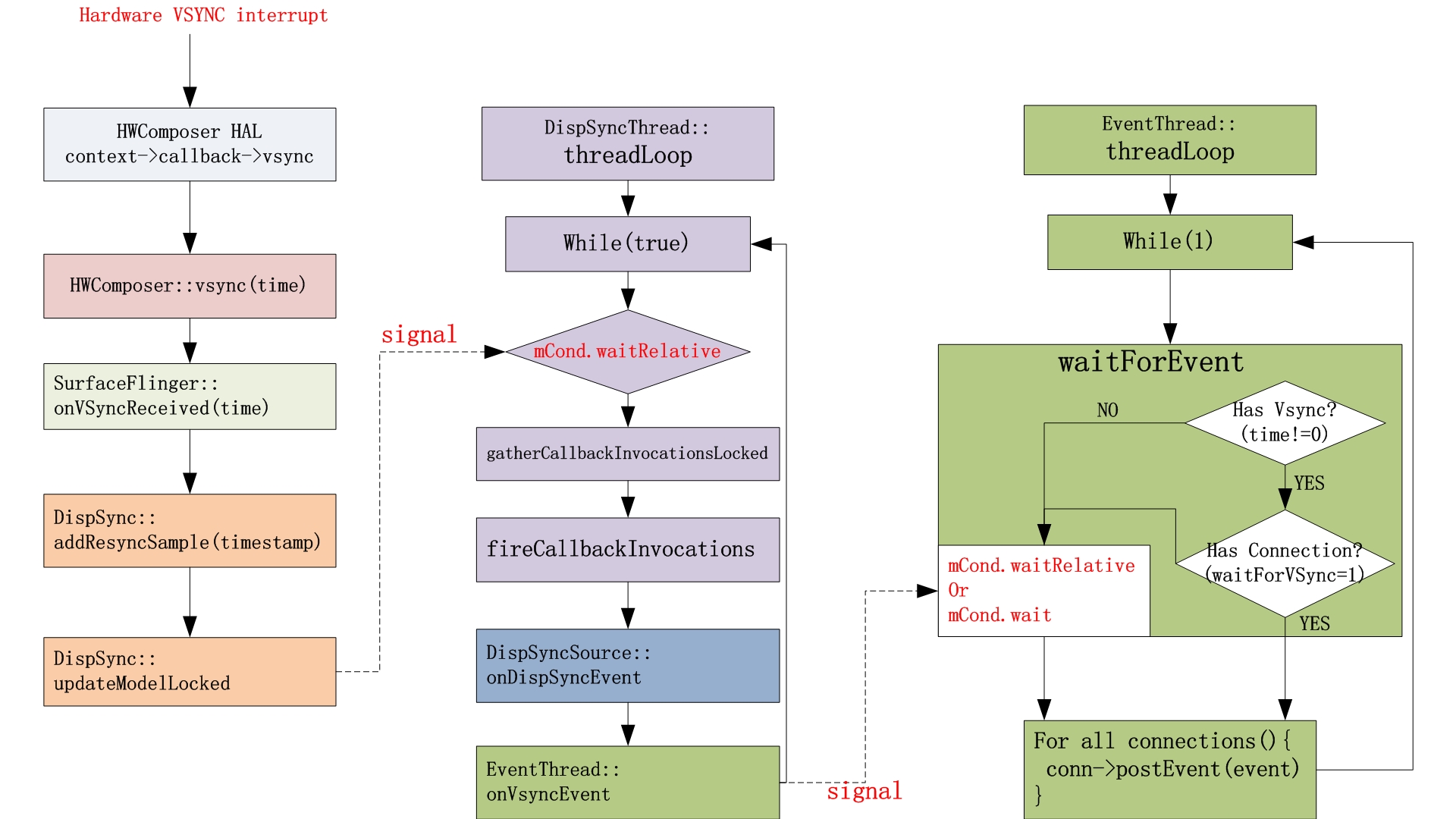
3.2. 流程图及部分代码
3.3. resyncToHardwareVsync打开硬件VYSNC
SurfaceFlinger在初始化HWComposer时会默认关闭硬件Vsync信号,这里直接调用eventControl
而resyncToHardwareVsync则是和硬件VSYNC进行同步,通过调用到setVsyncEnabled开启硬件VSYNC
//surfaceflinger/Scheduler/Scheduler.cpp
void Scheduler::resyncToHardwareVsync(bool makeAvailable, nsecs_t period, bool force_resync) {
{
std::lock_guard<std::mutex> lock(mHWVsyncLock);
//表示硬件VSYNC被enable
if (makeAvailable) {
mHWVsyncAvailable = makeAvailable;
} else if (!mHWVsyncAvailable) {
// Hardware vsync is not currently available, so abort the resync
// attempt for now
return;
}
}
if (period <= 0) {
return;
}
setVsyncPeriod(period, force_resync);
}
void Scheduler::setVsyncPeriod(nsecs_t period, bool force_resync) {
std::lock_guard<std::mutex> lock(mHWVsyncLock);
//设置DispSync模型里period为显示设备的频率
mPrimaryDispSync->setPeriod(period);
if (!mPrimaryHWVsyncEnabled || force_resync) {
mPrimaryDispSync->beginResync();
//如果硬件vsync没有enable,那么就通知EventControlThread去通知硬件enable VSYNC,这个和DispSync的setVsyncEnabled是不一样的
mEventControlThread->setVsyncEnabled(true);
mPrimaryHWVsyncEnabled = true;
}
}
setVsyncEnabled会释放mCond信号,这样在EventControlThread的threadLoop里的mCond会被唤醒去操作硬件Vsync开关
3.4. *addResyncSample更新mPeriod
3.4.1. 重要变量的含义:
- 硬件vsync样本个数:
MIN_RESYNC_SAMPLES_FOR_UPDATE(要6个硬件vsync样本以上才计算,当然样本越多,模型越精确) - mPeriod:即是显示屏的刷新率,这里mPeriod是根据样本个数去掉一个最大一个最小,算平均
- mPhase:偏移时间,这个相称和具体的SF/APP Thread里固定的相称是不一样的,这个相移是针对 mPeroid的一个偏移
- mModelUpdated:表示是否模型已经更新
- mReferenceTime:第一个硬件Vsync的时间,每次SW vsync计算下一个vsync时间时,都是以该时间作为基准,这样可以减少误差
3.4.2. Code
//surfaceflinger/Scheduler/DispSync.cpp
void DispSync::beginResync() {
Mutex::Autolock lock(mMutex);
ALOGV("[%s] beginResync", mName);
resetLocked();
}
bool DispSync::addResyncSample(nsecs_t timestamp, std::optional<nsecs_t> /*hwcVsyncPeriod*/,
bool* periodFlushed) {
Mutex::Autolock lock(mMutex);
ALOGV("[%s] addResyncSample(%" PRId64 ")", mName, ns2us(timestamp));
*periodFlushed = false;
//MAX_RESYNC_SAMPLES=32,即最大只保存32次硬件vysnc时间戳,用于计算SW Vsync模型
//mNumResyncSamples表示已有硬件Vysnc样本个数
//mFirstResyncSample用于记录第几个硬件vysnc
const size_t idx = (mFirstResyncSample + mNumResyncSamples) % MAX_RESYNC_SAMPLES;
//mResyncSamples用于记录每个硬件vsync样本的时间戳
mResyncSamples[idx] = timestamp;
if (mNumResyncSamples == 0) {
mPhase = 0;
ALOGV("[%s] First resync sample: mPeriod = %" PRId64 ", mPhase = 0, "
"mReferenceTime = %" PRId64,
mName, ns2us(mPeriod), ns2us(timestamp));
} else if (mPendingPeriod > 0) {
....
if (mTraceDetailedInfo) {
ATRACE_INT("DispSync:PendingPeriod", mPendingPeriod);
ATRACE_INT("DispSync:IntendedPeriod", mIntendedPeriod);
}
*periodFlushed = true;
}
}
.....
// Always update the reference time with the most recent timestamp.
mReferenceTime = timestamp;
mThread->updateModel(mPeriod, mPhase, mReferenceTime);
if (mNumResyncSamples < MAX_RESYNC_SAMPLES) {
mNumResyncSamples++;
} else {
mFirstResyncSample = (mFirstResyncSample + 1) % MAX_RESYNC_SAMPLES;
}
//开始计算更新SW Vsync模型
updateModelLocked();
......
ALOGV("[%s] addResyncSample returning %s", mName, modelLocked ? "locked" : "unlocked");
if (modelLocked) {
*periodFlushed = true;
mThread->lockModel();
}
return !modelLocked;
}
//计算更新SW Vsync模型,更新完后就会关闭硬件VSYNC信号
void DispSync::updateModelLocked() {
//MIN_RESYNC_SAMPLES_FOR_UPDATE=6
// 如果已经保存了6个以上的 硬件 vsync样本后,就要开始计算 sw vsync模型了
if (mNumResyncSamples >= MIN_RESYNC_SAMPLES_FOR_UPDATE) {
nsecs_t durationSum = 0;
nsecs_t minDuration = INT64_MAX;
nsecs_t maxDuration = 0;
static constexpr size_t numSamplesSkipped = 2; //跳过两个,因为可能存在不准确、延迟
//还记得上面 如果 mNumResyncSamples=0,即第一个硬件vsync时,直接更新SW vsync模型了,所以这里把第一个给去除掉
for (size_t i = numSamplesSkipped; i < mNumResyncSamples; i++) {
size_t idx = (mFirstResyncSample + i) % MAX_RESYNC_SAMPLES;
size_t prev = (idx + MAX_RESYNC_SAMPLES - 1) % MAX_RESYNC_SAMPLES;
// mResyncSamples[idx] - mResyncSamples[prev] 这个差值就是计算出两个硬件vsync样本之间的时间间隔
nsecs_t duration = mResyncSamples[idx] - mResyncSamples[prev];
// durationSum 表示保存的所有样本(除去前两个vsync)时间间隔之后,用于后面计算 平均 mPeriod
durationSum += duration;
minDuration = min(minDuration, duration);
maxDuration = max(maxDuration, duration);
}
// 去掉一个最小,一个最大值再来计算平均值,这个平均值就是硬件vsync产生的时间间隔
durationSum -= minDuration + maxDuration;
// 减去4
mPeriod = durationSum / (mNumResyncSamples - numSamplesSkipped - 2);
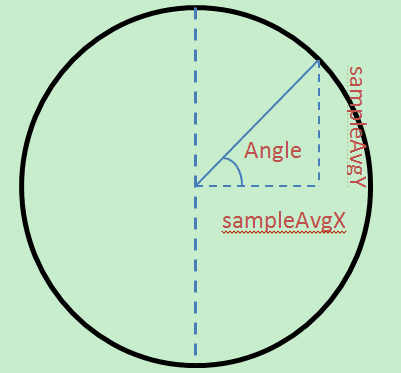
//下面计算出模型需要的偏移, 因为现在 mPeriod 算出来的是平均值,所以并不是真的硬件vsync时间间隔就是 mPeriod, 存在着偏移与噪音(这个和样本个数有很大的关系)
// 即有些样本信号的时间间隔大于平均值,而有些样本时间间隔小于平均值,而这些与 mPriod的差值就是偏移
// 下面就是要算出这些平均的偏移值
double sampleAvgX = 0;
double sampleAvgY = 0;
//将硬件vsync的时间间隔换算成对应的度数,即刻度,这里的刻度表示每ns代表多少度
// M_PI是圆周率 3.14159265359f,其中2π就是值360度
double scale = 2.0 * M_PI / double(mPeriod);
for (size_t i = numSamplesSkipped; i < mNumResyncSamples; i++) {
size_t idx = (mFirstResyncSample + i) % MAX_RESYNC_SAMPLES;
nsecs_t sample = mResyncSamples[idx] - mReferenceTime;
// 这里对mPeriod取余就是相对于mPeriod倍数的偏移值,然后将其转换成对应的度数
double samplePhase = double(sample % mPeriod) * scale;
sampleAvgX += cos(samplePhase); //依次累加成 sampleAvgX
sampleAvgY += sin(samplePhase); //依次累加成 sampleAvgY
}
//获得在x轴与y轴的偏移的平均值
sampleAvgX /= double(mNumResyncSamples - numSamplesSkipped);
sampleAvgY /= double(mNumResyncSamples - numSamplesSkipped);
//最后再通过atan2获得最终的相移值
mPhase = nsecs_t(atan2(sampleAvgY, sampleAvgX) / scale);
//如果相移偏过了mPeriod的一半,那么重新调整一下
if (mPhase < -(mPeriod / 2)) {
mPhase += mPeriod;
ALOGV("[%s] Adjusting mPhase -> %" PRId64, mName, ns2us(mPhase));
}
// 将最新的 偏移 mPhase和 vsync时间间隔mPeriod和mReferenceTime更新到SW vsync模型当中
mThread->updateModel(mPeriod, mPhase, mReferenceTime);
// 模型更新了
mModelUpdated = true;
}
}
3.4.3. 计算的相移图
3.5. setVsyncEnabled硬件VSYNC开关控制
SurfaceFlinger::init() ---->
SurfaceFlinger::processDisplayHotplugEventsLocked() ---->
SurfaceFlinger::initScheduler 创建sf thread和app thread ---->
SurfaceFlinger::setVsyncEnabled(bool enabled) [传入true,开启硬件vsync] ----->
SurfaceFlinger::setVsyncEnabledInternal(bool enabled)
硬件vsync相关函数:
void SurfaceFlinger::setVsyncEnabledInternal(bool enabled) {
ATRACE_CALL();
Mutex::Autolock lockVsync(mVsyncLock);
//复制
mHWCVsyncPendingState = enabled ? hal::Vsync::ENABLE : hal::Vsync::DISABLE;
auto displayId = getInternalDisplayIdLocked();
if (mNextVsyncSource) {
// Disable current vsync source before enabling the next source
if (mActiveVsyncSource) {
displayId = mActiveVsyncSource->getId();
getHwComposer().setVsyncEnabled(*displayId, hal::Vsync::DISABLE);
}
displayId = mNextVsyncSource->getId();
} else if (mActiveVsyncSource) {
displayId = mActiveVsyncSource->getId();
}
getHwComposer().setVsyncEnabled(*displayId, mHWCVsyncPendingState);
if (mNextVsyncSource) {
mActiveVsyncSource = mNextVsyncSource;
mNextVsyncSource = NULL;
}
}
4. DispSync
DispSyncThread是软件产生vsync的线程,也控制硬件VSync信号同步。DispSync是定义在SurfaceFlinger类里的成员变量,因此在初始化 SurfaceFlinger时,就会初始化DispSync。
4.1. DispSync初始化
流程:
SurfaceFlinger::init() ---->
SurfaceFlinger::processDisplayHotplugEventsLocked() --->
SurfaceFlinger::initScheduler ----->
surfaceflinger/SurfaceFlingerDefaultFactory.cpp -- DefaultFactory::createScheduler --->
Scheduler::Scheduler [构造函数] ---->
std::unique_ptr<DispSync> createDispSync [创建DispSync]
代码:
Scheduler构造函数:
//frameworks/native/services/surfaceflinger/Scheduler/Scheduler.cpp
Scheduler::Scheduler(impl::EventControlThread::SetVSyncEnabledFunction function,
const scheduler::RefreshRateConfigs& refreshRateConfig,
ISchedulerCallback& schedulerCallback, bool useContentDetectionV2,
bool useContentDetection)
: mSupportKernelTimer(sysprop::support_kernel_idle_timer(false)),
mPrimaryDispSync(createDispSync(mSupportKernelTimer)), //调用createDispSync函数
mEventControlThread(new impl::EventControlThread(std::move(function))),
mSchedulerCallback(schedulerCallback),
mRefreshRateConfigs(refreshRateConfig),
mUseContentDetection(useContentDetection),
mUseContentDetectionV2(useContentDetectionV2) { ....
std::unique_ptr<DispSync> createDispSync(bool supportKernelTimer) {
...
} else {
return std::make_unique<impl::DispSync>("SchedulerDispSync",
sysprop::running_without_sync_framework(true));
}
}
//surfaceflinger/Scheduler/DispSync.cpp
//构造函数
DispSync::DispSync(const char* name, bool hasSyncFramework)
: mName(name), mIgnorePresentFences(!hasSyncFramework) {
mThread = new DispSyncThread(name, mTraceDetailedInfo); //创建DispSyncThread对象
mThread->run("DispSync", PRIORITY_URGENT_DISPLAY + PRIORITY_MORE_FAVORABLE); //线程执行
...
}
class DispSyncThread : public Thread {
public:
DispSyncThread(const char* name, bool showTraceDetailedInfo)
: mName(name),
mStop(false),
mModelLocked("DispSync:ModelLocked", false),
mPeriod(0), //初始化为0
mPhase(0),
mReferenceTime(0),
mWakeupLatency(0),
mFrameNumber(0),
mTraceDetailedInfo(showTraceDetailedInfo) {}
......
virtual bool threadLoop() {
status_t err;
nsecs_t now = systemTime(SYSTEM_TIME_MONOTONIC);
...
//当threadLoop第一次进来后,由于mPeriod初始化为0,所以一直死等在这里
if (mPeriod == 0) {
err = mCond.wait(mMutex);
if (err != NO_ERROR) {
ALOGE("error waiting for new events: %s (%d)", strerror(-err), err);
return false;
}
continue;
}
//计算下一次vsync事件的时间
targetTime = computeNextEventTimeLocked(now);
.....
}
4.2. addEventListener唤醒线程DispSyncThread
接着上面threadmain函数流程调用到addEventListener,此处将唤醒上面threadloop的mCond.wait(mMutex)
status_t addEventListener(const char* name, nsecs_t phase, DispSync::Callback* callback,
nsecs_t lastCallbackTime) {
...
mEventListeners.push_back(listener);
//唤醒线程,threadLoop可以跳出循环继续执行
mCond.signal();
return NO_ERROR;
}
而mPeriod == 0)则仍旧是0,所以此时会continue继续往下执行。计算下一个Vsync信号的时间戳,并且上报给EventListener,如此DispSyncThread模型就会运作起来。
4.3. HWComposer回调onVysncReceived
surfaceflinger/DisplayHardware/HWComposer.cpp -- class ComposerCallbackBridge - android::hardware::Return<void> onVsync ---->
SurfaceFlinger::onVsyncReceived ---->
(1) addResyncSample 更新vysnc计算模型
(2) VSyncModulator::onRefreshRateChangeCompleted
此处会调用到addResyncSample函数,该函数会加入硬件vsync的样本,目的是为了计算、更新SW VSYNC的参数。具体解释将对应小节。
void SurfaceFlinger::onVsyncReceived(int32_t sequenceId, hal::HWDisplayId hwcDisplayId,
int64_t timestamp,
std::optional<hal::VsyncPeriodNanos> vsyncPeriod) {
ATRACE_NAME("SF onVsync"); //systrace
Mutex::Autolock lock(mStateLock);
// Ignore any vsyncs from a previous hardware composer.
if (sequenceId != getBE().mComposerSequenceId) {
return;
}
if (!getHwComposer().onVsync(hwcDisplayId, timestamp)) {
return;
}
bool periodFlushed = false;
mScheduler->addResyncSample(timestamp, vsyncPeriod, &periodFlushed);
if (periodFlushed) {
mVSyncModulator->onRefreshRateChangeCompleted();
}
}
//surfaceflinger/Scheduler/VSyncModulator.cpp
void VSyncModulator::onRefreshRateChangeCompleted() {
if (!mRefreshRateChangePending) {
return;
}
mRefreshRateChangePending = false;
updateOffsets();
}
void VSyncModulator::updateOffsets() {
std::lock_guard<std::mutex> lock(mMutex);
updateOffsetsLocked();
}
void VSyncModulator::updateOffsetsLocked() {
const Offsets& offsets = getNextOffsets();
mPhaseOffsetControl.setPhaseOffset(mSfConnectionHandle, offsets.sf);
mPhaseOffsetControl.setPhaseOffset(mAppConnectionHandle, offsets.app);
mOffsets = offsets;
if (!mTraceDetailedInfo) {
return;
}
const bool isEarly = &offsets == &mOffsetsConfig.early;
const bool isEarlyGl = &offsets == &mOffsetsConfig.earlyGl;
const bool isLate = &offsets == &mOffsetsConfig.late;
ATRACE_INT("Vsync-EarlyOffsetsOn", isEarly);
ATRACE_INT("Vsync-EarlyGLOffsetsOn", isEarlyGl);
ATRACE_INT("Vsync-LateOffsetsOn", isLate);
}
5. 计算SW vsync并向APP/SF发送vsync信号
在计算完后,继续执行DispSyncThread的threadloop函数:
//surfaceflinger/Scheduler/DispSync.cpp
virtual bool threadLoop() {
status_t err;
nsecs_t now = systemTime(SYSTEM_TIME_MONOTONIC);
...
//计算下一次vsync事件的时间
targetTime = computeNextEventTimeLocked(now);
bool isWakeup = false;
//等待计算出来的下一次vsync时间到来
//如果到了就发送SW VSYNC信号
if (now < targetTime) {
if (mTraceDetailedInfo) ATRACE_NAME("DispSync waiting");
if (targetTime == INT64_MAX) {
ALOGV("[%s] Waiting forever", mName);
err = mCond.wait(mMutex);
} else {
ALOGV("[%s] Waiting until %" PRId64, mName, ns2us(targetTime));
//等到SW VSYNC时间到了,就唤醒,发送vsync信号
err = mCond.waitRelative(mMutex, targetTime - now);
}
if (err == TIMED_OUT) {
isWakeup = true;
} else if (err != NO_ERROR) {
ALOGE("error waiting for next event: %s (%d)", strerror(-err), err);
return false;
}
}
now = systemTime(SYSTEM_TIME_MONOTONIC);
//计算wake up时间, 但是不能超过1.5 ms
static const nsecs_t kMaxWakeupLatency = us2ns(1500);
if (isWakeup) {
//累加mWakeupLatency醒来的时间
//用于在后面计算SW VSYNC时间
//所有的wake up时间最大不能超过1.5 ms
mWakeupLatency = ((mWakeupLatency * 63) + (now - targetTime)) / 64;
mWakeupLatency = min(mWakeupLatency, kMaxWakeupLatency);
if (mTraceDetailedInfo) {
ATRACE_INT64("DispSync:WakeupLat", now - targetTime);
ATRACE_INT64("DispSync:AvgWakeupLat", mWakeupLatency);
}
}
//收回回调的EventListener(在前面addEventListener中)
//
callbackInvocations =
gatherCallbackInvocationsLocked(now, computeNextRefreshLocked(0, now));
}
if (callbackInvocations.size() > 0) {
//向SF/APP EventThread发送vsync信号
fireCallbackInvocations(callbackInvocations);
}
}
return false;
}
5.1. 计算SW Vsync下一个vsync时间
这里其实就最多只有两种EventListener, 一个是SF EventThread,一个是App EventThread。
它们都需要接收Vsync信号来分别做不同的事情。
但是实际上两个线程都有一个vsync phase offset偏移值
//surfaceflinger/Scheduler/DispSync.cpp
private:
nsecs_t computeNextEventTimeLocked(nsecs_t now) {
if (mTraceDetailedInfo) ATRACE_CALL();
ALOGV("[%s] computeNextEventTimeLocked", mName);
nsecs_t nextEventTime = INT64_MAX;
for (size_t i = 0; i < mEventListeners.size(); i++) {
//对所有的EventListener进行分别计算,里面的mLastEventTime值不同
nsecs_t t = computeListenerNextEventTimeLocked(mEventListeners[i], now);
if (t < nextEventTime) {
nextEventTime = t;
}
}
return nextEventTime;
}
nsecs_t computeListenerNextEventTimeLocked(const EventListener& listener, nsecs_t baseTime) {
if (mTraceDetailedInfo) ATRACE_CALL();
//计算的是上一次vsync事件的时间,等于上一次vsync事件 + wake up唤醒时间
nsecs_t lastEventTime = listener.mLastEventTime + mWakeupLatency;
//一般情况是fasle;
//如果是true,比如第一次,threadLoop的now生成的时间比较早,而addEventListener发生的比较晚,
//listener的lastEventTime设为了当前的系统时间,此时baseTime就会小于lastEventTime
if (baseTime < lastEventTime) {
//重新修正baseTime
baseTime = lastEventTime;
ALOGV("[%s] Clamping baseTime to lastEventTime -> %" PRId64, mName, ns2us(baseTime));
}
//减去参考时间(第一个硬件vsync样本的时间)
baseTime -= mReferenceTime;
//mPhase是通过硬件vsync样本计算出来的
//listener.mPhase是固定的具体在编译时设置的(在PhaseOffsets.cpp中)
nsecs_t phase = mPhase + listener.mPhase;
//减去偏移
baseTime -= phase;
if (baseTime < 0) {
ALOGV("[%s] Correcting negative baseTime", mName);
baseTime = -mPeriod;
}
//求出下一时刻发送sw vsync的时间,这个时间是以第一个硬件vsync作为参考来这样计算
//如果以一个sw vsync时间作为参考,因为sw vsync的时间本身就是一种根据模型模拟出来的,所以本身存在误差,
//所以如果每个sw vsync以上一个作为base的话,那么它的误差会慢慢积累;
//而每次以第一个硬件vsync时间作为基准,那么每个sw vsync的误差,并不会累加,这样就相对来说更加精确些
nsecs_t numPeriods = baseTime / mPeriod;
//计算距离第一个硬件Vsync时间的偏移,即得到下一个sw vsync的时间,numPeriods + 1,注意是下一个vsync的时间
nsecs_t t = (numPeriods + 1) * mPeriod + phase;
//t是相对于每一个硬件vsync的时间
t += mReferenceTime;
//如果这个vsync距离上一个vsync时间小于3/5个mPeriod的话,为了避免连续的两个sw vsync,
//那么这次sw vsync就放弃了,直接放到下一个周期里
if (isCloseToPeriod(t - listener.mLastEventTime)) {
t += mPeriod;
ALOGV("[%s] Modifying t -> %" PRId64, mName, ns2us(t));
}
//当然算出来的时间要减去wake up的时间了,这样才能精确的模拟硬件vsync的时间,
//注意mWakeupLatency是所有wake up的时间累加,但是最大只能到1.5ms
t -= mWakeupLatency;
ALOGV("[%s] Corrected for wakeup latency -> %" PRId64, mName, ns2us(t));
return t;
}
bool isCloseToPeriod(nsecs_t duration) {
// Ratio of 3/5 is arbitrary, but it must be greater than 1/2.
return duration < (3 * mPeriod) / 5;
}
5.2. 向SF/APP EventThread发送vsync信号
//surfaceflinger/Scheduler/DispSync.cpp
std::vector<CallbackInvocation> gatherCallbackInvocationsLocked(nsecs_t now,
nsecs_t expectedVSyncTime) {
if (mTraceDetailedInfo) ATRACE_CALL();
std::vector<CallbackInvocation> callbackInvocations;
//因为computeListenerNextEventTimeLocked计算的是下一个vsync时间,
//那么这一次的vsync就以上now - mPeriod作为基准时间
nsecs_t onePeriodAgo = now - mPeriod;
for (auto& eventListener : mEventListeners) {
nsecs_t t = computeListenerNextEventTimeLocked(eventListener, onePeriodAgo);
if (t < now) {
if (isCloseToPeriod(now - eventListener.mLastCallbackTime)) {
eventListener.mLastEventTime = t;
ALOGV("[%s] [%s] Skipping event due to model error", mName,
eventListener.mName);
continue;
}
CallbackInvocation ci;
ci.mCallback = eventListener.mCallback;
ci.mEventTime = t;
ci.mExpectedVSyncTime = expectedVSyncTime;
if (eventListener.mPhase < 0) {
ci.mExpectedVSyncTime += mPeriod;
}
ALOGV("[%s] [%s] Preparing to fire, latency: %" PRId64, mName, eventListener.mName,
t - eventListener.mLastEventTime);
//回调
callbackInvocations.push_back(ci);
eventListener.mLastEventTime = t;
eventListener.mLastCallbackTime = now;
}
}
return callbackInvocations;
}
6. postComposition更新SW Vsync的误差值
//surfaceflinger/SurfaceFlinger.cpp
void SurfaceFlinger::postComposition()
{
ATRACE_CALL();
ALOGV("postComposition");
...
getBE().mDisplayTimeline.updateSignalTimes();
mPreviousPresentFences[1] = mPreviousPresentFences[0];
sp<DisplayDevice> vSyncSource = mNextVsyncSource;
if (mNextVsyncSource == NULL) {
vSyncSource = mActiveVsyncSource;
}
mPreviousPresentFences[0] = vSyncSource ?
getHwComposer().getPresentFence(*vSyncSource->getId()) : Fence::NO_FENCE;
auto presentFenceTime = std::make_shared<FenceTime>(mPreviousPresentFences[0]);
getBE().mDisplayTimeline.push(presentFenceTime);
...
//获取fence
mTransactionCompletedThread.addPresentFence(mPreviousPresentFences[0]);
mTransactionCompletedThread.sendCallbacks();
if (display && display->isPrimary() && display->getPowerMode() == hal::PowerMode::ON &&
presentFenceTime->isValid()) {
mScheduler->addPresentFence(presentFenceTime);
}
...
}
//surfaceflinger/Scheduler/Scheduler.cpp
void Scheduler::addPresentFence(const std::shared_ptr<FenceTime>& fenceTime) {
if (mPrimaryDispSync->addPresentFence(fenceTime)) {
//如果addPresentFence返回true,则说明SW vsync和硬件Vsync的误差太大
//此时就需要重新打开硬件vsync,来重新调节计算SW vsync模型
enableHardwareVsync();
} else {
disableHardwareVsync(false);
}
}
6.1. addPresentFence
//surfaceflinger/Scheduler/DispSync.cpp
bool DispSync::addPresentFence(const std::shared_ptr<FenceTime>& fenceTime) {
Mutex::Autolock lock(mMutex);
if (mIgnorePresentFences) {
return true;
}
//将当前硬件vsync的fence保存到mPresentFences中,
//目的是为了计算偏移
mPresentFences[mPresentSampleOffset] = fenceTime;
mPresentSampleOffset = (mPresentSampleOffset + 1) % NUM_PRESENT_SAMPLES;
//置为0
mNumResyncSamplesSincePresent = 0;
//更新错误信息
updateErrorLocked();
//一般情况下mModelUpdated已经被更新,然后硬件vsync被disable
//所以这里只需要看SW VSYNC的真实的硬件vsync的误差是否在可允许的范围内即可
return !mModelUpdated || mError > kErrorThreshold;
}
上面的mError是方差,当方差大于kErrorThreshold就返回true。
//surfaceflinger/Scheduler/DispSync.cpp
void DispSync::updateErrorLocked() {
if (!mModelUpdated) {
return;
}
int numErrSamples = 0;
nsecs_t sqErrSum = 0;
//NUM_PRESENT_SAMPLES=8
for (size_t i = 0; i < NUM_PRESENT_SAMPLES; i++) {
nsecs_t time = mPresentFences[i]->getCachedSignalTime();
if (time == Fence::SIGNAL_TIME_PENDING || time == Fence::SIGNAL_TIME_INVALID) {
continue;
}
//mReferenceTime是第一个硬件vsync的时间戳(addResyncSample中)
nsecs_t sample = time - mReferenceTime;
//此处sample一般情况下是大于偏移量mPhase的
if (sample <= mPhase) {
continue;
}
5
nsecs_t sampleErr = (sample - mPhase) % mPeriod;
if (sampleErr > mPeriod / 2) {
sampleErr -= mPeriod;
}
//记录偏移差的平方和
sqErrSum += sampleErr * sampleErr;
numErrSamples++;
}
//mError即求出的方差
if (numErrSamples > 0) {
mError = sqErrSum / numErrSamples;
mZeroErrSamplesCount = 0;
} else {
mError = 0;
// Use mod ACCEPTABLE_ZERO_ERR_SAMPLES_COUNT to avoid log spam.
mZeroErrSamplesCount++;
ALOGE_IF((mZeroErrSamplesCount % ACCEPTABLE_ZERO_ERR_SAMPLES_COUNT) == 0,
"No present times for model error.");
}
if (mTraceDetailedInfo) {
ATRACE_INT64("DispSync:Error", mError);
}
}
7. 参考文献
参考google文章: 在 Android 上进行高刷新率渲染
Google官网Multiple Refresh Rate
Leave a comment