Android系统启动流程—1 init进程启动流程
本篇介绍Android系统启动流程的开始阶段,从kernel内核空间启动第一个用户空间init进程,然后梳理init进程启动的几个阶段做了哪些任务。
1. Android系统启动整体流程概述
首先了解下Android系统启动的整体流程
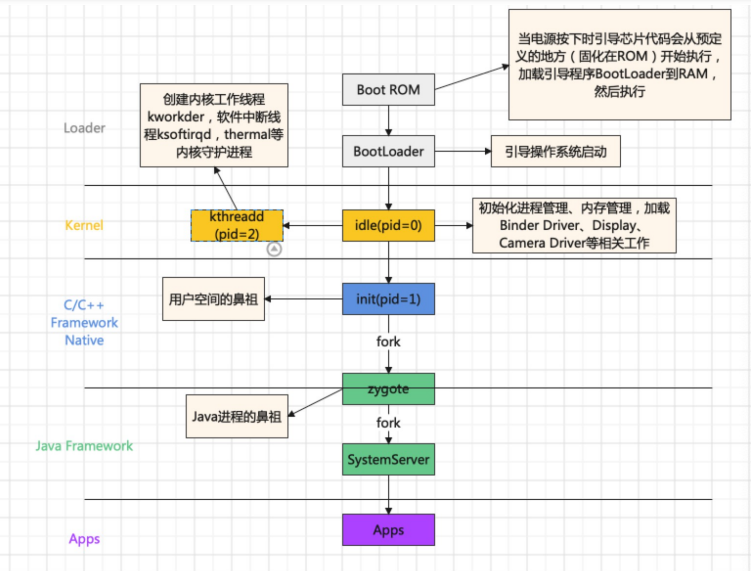
- Boot Rom阶段:启动电源时,引导芯片代码开始从预定义的地方(固化在ROM)开始执行。加载引导程序到RAM,然后执行。
- Bootloader阶段:Bootloader(引导加载程序)是在Android操作系统开始运行前的一个小程序,负责加载和启动Linux内核。Bootloader的实现在不同设备和制造商之间可能有所不同,可能是开源实现如U-Boot或LK,或者厂商定制的版本,源码目录在
/bootable/ - Linux Kernel启动阶段:在Bootloader的帮助下,Linux内核开始启动。内核启动时,会进行系统缓存、内存保护、任务调度等设置,并加载必要的驱动程序。当内核完成系统设置,它首先在系统文件中寻找 “init” 文件,然后启动系统的第一个进程(init进程)
- Init进程启动阶段:Init进程是Android系统中用户空间的第一个进程,进程号固定为1。Init进程的主要职责包括创建和挂载必要的文件目录、初始化属性服务、解析init.rc配置文件并启动Zygote进程等
- 启动Android系统阶段:Init进程根据
init.rc文件的内容执行更多初始化任务,如启动Android的关键守护进程和Zygote进程。Zygote进程是所有应用进程的父进程,负责创建其他系统进程 - 启动Launcher App阶段:最后,系统启动用户空间的第一个App——Launcher App,标志着Android系统启动流程的完成
PS: 前面两个步骤不在此处详细说明,关于uboot启动以及uboot如何跳转到kernel内核,可以参阅这几篇文章了解:
我们在kernel中只关注init进程的启动流程,所以本篇主题以kernel内核启动init进程开始梳理(以Android 10 AOSP源码为基准)
2. kernel内核启动init进程
我们从内核启动的
start_kernel开始梳理(代码文件kernel/init/main.c),该内核入口函数的最后调用rest_init,然后rest_init(void)函数创建两个内核子线程,一个是kernel_init,另一个kthreadd
- kernel_init线程:主要创建Android init一号进程
- kthreadd线程:通过kernel_thread创建,并始终运行在内核空间, 负责所有内核线程的调度和管理(代码文件:
kernel/kernel/kthread.c)
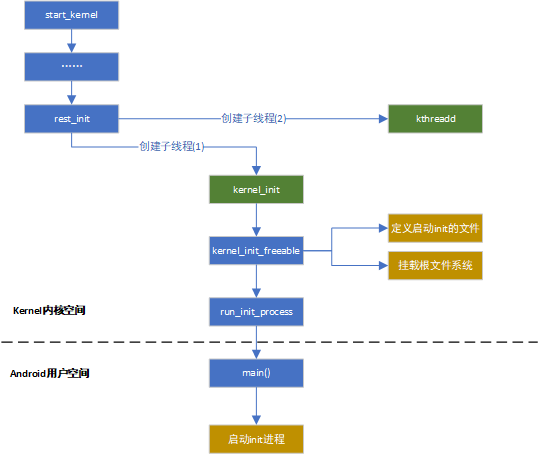
在内核代码kernel/init/main.c -- kernel_init()函数最后会通过调用run_init_process启动init进程。(Android系统一般会在根目录下放一个init的可执行文件,也就是说Linux系统的init进程在内核初始化完成后,就直接执行init这个文件)
其中kernel_init_freeable函数中有两点要关注:
- 定义了ramdisk_execute_command变量的值为”/init”,用于寻找所要启动的init文件
- 调用prepare_namespace()方法,该方法内部调用mount_root(),挂载根文件系统
//代码文件kernel/init/main.c
static noinline void __init kernel_init_freeable(void)
{
....
if (!ramdisk_execute_command)
ramdisk_execute_command = "/init";
if (sys_access((const char __user *) ramdisk_execute_command, 0) != 0) {
ramdisk_execute_command = NULL;
prepare_namespace();
}
....
}
//在rest_init中创建子线程用于生成init进程,函数名就是kernel_init
static int __ref kernel_init(void *unused)
{
int ret;
//进行init进程的一些初始化操作
kernel_init_freeable();
.....
//ramdisk_execute_command的值为"/init"
//运行根目录下的init程序
if (ramdisk_execute_command) {
ret = run_init_process(ramdisk_execute_command);
if (!ret)
return 0;
pr_err("Failed to execute %s (error %d)\n",
ramdisk_execute_command, ret);
}
....
}
关于此处的/init进程,我们可以看下/system/core/init/Android.bp的模块定义
PS: stem字段定义了输出的基本文件名,是用于重命名输出的选项,比如此处编译模块名是init_second_stage,编译结束后init_second_stage会命名成init
cc_binary {
name: "init_second_stage",
recovery_available: true,
stem: "init",
defaults: ["init_defaults"],
static_libs: ["libinit"],
required: [
"e2fsdroid",
"init.rc",
"mke2fs",
"sload_f2fs",
"make_f2fs",
"ueventd.rc",
],
srcs: ["main.cpp"],
....
而在adb shell进入文件系统看到根目录的init就是软链接指向/system/bin/init
# ls -thl |grep init
lrwxr-x--- 1 root shell 16 2009-01-01 08:00 init -> /system/bin/init
2.1. 序列图

3. init进程
Android系统底层基于Linux Kernel, 当Kernel启动过程会创建init进程, 该进程是所有用户空间的鼻祖, 是Linux系统中用户空间的第一个进程。
3.1. init进程启动入口main函数
init是Linux系统中用户空间的第一个进程(pid=1), 从上面/system/core/init/Android.bp的定义看,模块入口是system/core/init/main.cpp -- main()方法。
$ ps -A
USER PID PPID VSZ RSS WCHAN ADDR S NAME
root 1 0 49852 10816 0 0 S init
root 2 0 0 0 0 0 S [kthreadd]
....
代码如下:
//第一个参数argc表示参数个数,第二个参数是参数列表,也就是具体的参数
int main(int argc, char** argv) {
#if __has_feature(address_sanitizer)
__asan_set_error_report_callback(AsanReportCallback);
#endif
//修改当前进程优先级
setpriority(PRIO_PROCESS, 0, -20);
/*
* 1.strcmp是String的一个函数,比较字符串,相等返回0
* 2.C++中0也可以表示false
* 3.basename是C库中的一个函数,得到特定的路径中的最后一个'/'后面的内容,
* 比如/sdcard/miui_recovery/backup,得到的结果是backup
*/
//当argv[0]的内容为ueventd时,strcmp的值为0,!strcmp为1
//ueventd主要是负责设备节点的创建、权限设定等一系列工作
if (!strcmp(basename(argv[0]), "ueventd")) {
return ueventd_main(argc, argv);
}
//当传入的参数个数大于1时,执行下面的几个操作
if (argc > 1) {
//参数为subcontext,初始化日志系统
if (!strcmp(argv[1], "subcontext")) {
android::base::InitLogging(argv, &android::base::KernelLogger);
const BuiltinFunctionMap& function_map;
return SubcontextMain(argc, argv, &function_map);
}
//参数为“selinux_setup”,启动Selinux安全策略
if (!strcmp(argv[1], "selinux_setup")) {
return SetupSelinux(argv);
}
//参数为“second_stage”,启动init进程第二阶段
if (!strcmp(argv[1], "second_stage")) {
return SecondStageMain(argc, argv);
}
}
//默认启动init进程第一阶段
return FirstStageMain(argc, argv);
}
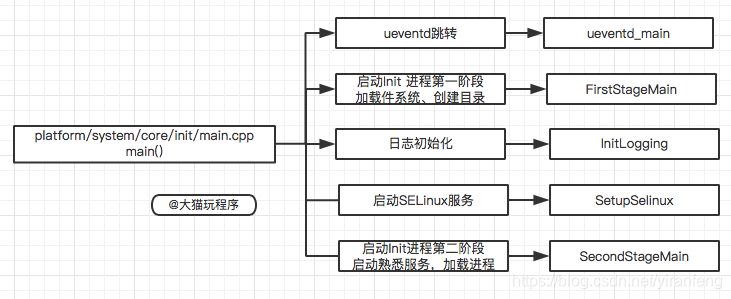
单从main函数的代码内容看,init进程启动后主要做了以下工作(非程序执行顺序):
- ueventd_main:创建子进程ueventd,并将创建设备节点文件的工作交给veventd。ueventd通过两种方式创建设备节点文件(冷启动和热启动),用来管理设备,如果有新设备插入,就会在/dev创建对应的设备文件。
- FirstStageMain:启动init进程第一阶段(加载文件系统、创建目录、节点)
- InitLogging:初始化日志系统
- SetupSelinux:加载Selinux规则,并设置Selinux日志,完成Selinux相关工
- SecondStageMain:启动init进程第二阶段(初始化属性、处理信号、解析init.rc文件等)
3.1.1. main函数执行顺序(kernel日志示例)
以下是Android 10版本抓取的开机kernel日志,我们结合代码分析init进程的main函数执行顺序。从日志看,main函数的执行顺序是:
- 执行FirstStageMain
- 执行SetupSelinux
- 执行SecondStageMain
- 执行ueventd_main(此部分是在SecondStageMain的时候解析init.rc中调用,后续梳理)
//-------------Step 1: 执行FirstStageMain
14,737,1909438,-;init: init first stage started!
14,738,1910109,-;init: Switching root to '/first_stage_ramdisk'
//挂载文件系统节点
6,744,2012037,-;EXT4-fs (mmcblk0p35): mounted filesystem with ordered data mode. Opts:
//挂载system分区
14,745,2012182,-;init: [libfs_mgr]__mount(source=/dev/block/by-name/system_b,target=/system,type=ext4)=0: Success
14,746,2012616,-;init: Switching root to '/system'
14,747,2019657,-;init: [libfs_mgr]superblock s_max_mnt_count:65535,/dev/block/by-name/vendor_b
6,748,2024936,-;EXT4-fs (mmcblk0p37): mounted filesystem with ordered data mode. Opts:
//挂载vendor分区
14,749,2025030,-;init: [libfs_mgr]__mount(source=/dev/block/by-name/vendor_b,target=/vendor,type=ext4)=0: Success
14,750,2061016,-;init: Skipped setting INIT_AVB_VERSION (not in recovery mode)
//-------------Step 2: 执行SetupSelinux初始化selinux权限
14,751,2212653,-;init: Loading SELinux policy
7,752,2238189,-;SELinux: 8192 avtab hash slots, 23703 rules.
7,753,2265557,-;SELinux: 8192 avtab hash slots, 23703 rules.
7,754,2265585,-;SELinux: 1 users, 4 roles, 1419 types, 0 bools, 1 sens, 1024 cats
7,755,2265606,-;SELinux: 97 classes, 23703 rules
6,756,2270004,-;SELinux: Class rpmsg_socket not defined in policy.
6,757,2270022,-;SELinux: the above unknown classes and permissions will be denied
6,758,2270054,-;SELinux: policy capability network_peer_controls=1
6,759,2270061,-;SELinux: policy capability open_perms=1
6,760,2270068,-;SELinux: policy capability extended_socket_class=1
6,761,2270075,-;SELinux: policy capability always_check_network=0
6,762,2270081,-;SELinux: policy capability cgroup_seclabel=0
6,763,2270088,-;SELinux: policy capability nnp_nosuid_transition=1
7,764,2270095,-;SELinux: Completing initialization.
7,765,2270101,-;SELinux: Setting up existing superblocks.
6,766,2338067,-;[K] tp_enable=[0] i2c_master_send1: 0x4 0x1
5,767,2495244,-;audit: type=1403 audit(5.136:2): policy loaded auid=4294967295 ses=4294967295
14,768,2495539,-;selinux: SELinux: Loaded policy from /vendor/etc/selinux/precompiled_sepolicy\x0a
14,769,2503260,-;selinux: SELinux: Loaded file_contexts\x0a
//-------------Step 3: 执行SecondStageMain
14,770,2560465,-;init: init second stage started!
14,771,2591159,-;init: Using Android DT directory /proc/device-tree/firmware/android/
14,772,2596877,-;selinux: SELinux: Loaded file_contexts\x0a
//SelinuxRestoreContext函数打印
14,773,2596914,-;init: Running restorecon...
12,774,2606364,-;init: Couldn't load property file '/system/etc/prop.default': open() failed: No such file or directory: No such file or directory
12,775,2606444,-;init: Couldn't load property file '/prop.default': open() failed: No such file or directory: No such file or directory
12,776,2610584,-;init: Overriding previous 'ro.' property 'pm.dexopt.first-boot':'quicken' with new value 'speed'
12,777,2610921,-;init: Couldn't load property file '/vendor/default.prop': open() failed: No such file or directory: No such file or directory
12,778,2614148,-;init: Couldn't load property file '/product_services/build.prop': open() failed: No such file or directory: No such file or directory
12,779,2614210,-;init: Couldn't load property file '/factory/factory.prop': open() failed: No such file or directory: No such file or directory
//-------------Step 4:执行ueventd_main
14,783,2866884,-;ueventd: ueventd started!
14,784,2870766,-;selinux: SELinux: Loaded file_contexts\x0a
//解析uevent.rc文件
14,785,2871030,-;ueventd: Parsing file /ueventd.rc...
14,786,2872643,-;ueventd: Parsing file /vendor/ueventd.rc...
14,787,2872693,-;ueventd: Unable to read config file '/vendor/ueventd.rc': open() failed: No such file or directory
14,788,2872755,-;ueventd: Parsing file /odm/ueventd.rc...
14,789,2872798,-;ueventd: Unable to read config file '/odm/ueventd.rc': open() failed: No such file or directory
14,790,2872922,-;ueventd: Parsing file /ueventd.{product}.rc...
14,791,2876994,-;apexd: Bootstrap subcommand detected
14,792,2897540,-;apexd: Scanning /system/apex for embedded keys
14,793,2899450,-;apexd: Scanning /product/apex for embedded keys
14,794,2899967,-;apexd: ... does not exist. Skipping
14,795,2900655,-;apexd: Scanning /system/apex looking for APEX packages.
14,796,2901208,-;apexd: Found /system/apex/com.android.conscrypt
14,797,2901966,-;apexd: Skipped when bootstrapping
14,798,2902448,-;apexd: Found /system/apex/com.android.media
14,799,2903155,-;apexd: Skipped when bootstrapping
14,800,2903594,-;apexd: Found /system/apex/com.android.media.swcodec
4,801,2919017,-;apexd: 9 output lines suppressed due to ratelimiting
5,802,2935927,-;audit: type=1400 audit(5.576:3): avc: denied { nosuid_transition } for pid=1904 comm="init" scontext=u:r:init:s0 tcontext=u:r:init-insmod-sh:s0 tclass=process2 permissive=1
5,803,2947227,-;audit: type=1400 audit(5.588:4): avc: denied { nosuid_transition } for pid=1917 comm="init" scontext=u:r:init:s0 tcontext=u:r:hal_graphics_allocator_default:s0 tclass=process2 permissive=1
//ueventd执行结束
14,804,3223055,-;ueventd: Coldboot took 0.347 seconds
....
3.2. (1)FirstStageMain – 启动init进程第一阶段
第一阶段主要进行创建设备节点和一些关键目录、初始化kernel日志输出系统、挂载分区、AVB初始化。
//system/core/init/first_stage_init.cpp
int FirstStageMain(int argc, char** argv) {
//init crash时重启引导加载程序(panic)
//这个函数主要作用将各种信号量,如SIGABRT,SIGBUS等的行为设置为SA_RESTART,一旦监听到这些信号即执行重启系统
//REBOOT_BOOTLOADER_ON_PANIC在system/core/init/Android.mk中定义,userdebug和eng版本的固件中,则会打开该选项
if (REBOOT_BOOTLOADER_ON_PANIC) {
//调用到system/core/init/reboot_utils.cpp方法,然后调用InitFatalReboot(),再调用RebootSystem重启
InstallRebootSignalHandlers();
}
.....
// Clear the umask.清空文件权限
umask(0);
....
//1.挂载tmpsfs、devpts、proc、sysfs和selinuxfs五种文件系统,这些都是系统运行时目录,系统停止时会消失
//2.创建目录/dev/pts,/dev/socket
//3.创建节点/dev/kmsg,/dev/kmsg_debug,/dev/random,/dev/urandom,/dev/ptmx,/dev/null
CHECKCALL(mount("tmpfs", "/dev", "tmpfs", MS_NOSUID, "mode=0755")); //节点目录
CHECKCALL(mkdir("/dev/pts", 0755));
CHECKCALL(mkdir("/dev/socket", 0755));
//devpts文件系统用于为android终端设备提供模拟终端会话界面,类似于使用telnet或ssh与一个传统的UNIX服务器进行连接
CHECKCALL(mount("devpts", "/dev/pts", "devpts", 0, NULL));
#define MAKE_STR(x) __STRING(x)
CHECKCALL(mount("proc", "/proc", "proc", 0, "hidepid=2,gid=" MAKE_STR(AID_READPROC)));//进程信息
#undef MAKE_STR
//存储内核启动保存的一些参数,比如AB分区的运行
CHECKCALL(chmod("/proc/cmdline", 0440));
gid_t groups[] = {AID_READPROC};
CHECKCALL(setgroups(arraysize(groups), groups));
CHECKCALL(mount("sysfs", "/sys", "sysfs", 0, NULL)); //设备系统目录
CHECKCALL(mount("selinuxfs", "/sys/fs/selinux", "selinuxfs", 0, NULL));//selinuxfs文件系统
CHECKCALL(mknod("/dev/kmsg", S_IFCHR | 0600, makedev(1, 11)));//内核日志节点
if constexpr (WORLD_WRITABLE_KMSG) {
CHECKCALL(mknod("/dev/kmsg_debug", S_IFCHR | 0622, makedev(1, 11)));
}
CHECKCALL(mknod("/dev/random", S_IFCHR | 0666, makedev(1, 8)));
CHECKCALL(mknod("/dev/urandom", S_IFCHR | 0666, makedev(1, 9)));
// This is needed for log wrapper, which gets called before ueventd runs.
CHECKCALL(mknod("/dev/ptmx", S_IFCHR | 0666, makedev(5, 2)));
CHECKCALL(mknod("/dev/null", S_IFCHR | 0666, makedev(1, 3)));
//mnt挂载点目录,一般用于挂载外部存储设备、U盘、SD卡等外部存储设备
CHECKCALL(mount("tmpfs", "/mnt", "tmpfs", MS_NOEXEC | MS_NOSUID | MS_NODEV,
"mode=0755,uid=0,gid=1000"));
//创建/mnt/vendor和/mnt/product目录
CHECKCALL(mkdir("/mnt/vendor", 0755));
CHECKCALL(mkdir("/mnt/product", 0755));
//挂载APEX,这在Android 10.0中特殊引入,用来解决碎片化问题,类似一种组件方式,对Treble的增强,
//不写谷歌特殊更新不需要完整升级整个系统版本,只需要像升级APK一样,进行APEX组件升级
CHECKCALL(mount("tmpfs", "/apex", "tmpfs", MS_NOEXEC | MS_NOSUID | MS_NODEV,
"mode=0755,uid=0,gid=0"));
// /debug_ramdisk is used to preserve additional files from the debug ramdisk
CHECKCALL(mount("tmpfs", "/debug_ramdisk", "tmpfs", MS_NOEXEC | MS_NOSUID | MS_NODEV,
"mode=0755,uid=0,gid=0"));
#undef CHECKCALL
//调用system/core/init/util.cpp的方法
//把标准输入、标准输出和标准错误(即stdin/stdout/stderr)重定向到空设备文件"/dev/null"
SetStdioToDevNull(argv);
//调用system/core/init/util.cpp的方法,然后调用InitLogging入参KernelLogger
//上面已经在/dev目录下挂载好tmpfs以及kmsg节点,此处可以初始化/kernel Log系统,供用户打印log
InitKernelLogging(argv);
//此处会在内核kernel中打印日志!
LOG(INFO) << "init first stage started!";
auto old_root_dir = std::unique_ptr<DIR, decltype(&closedir)>{opendir("/"), closedir};
if (!old_root_dir) {
PLOG(ERROR) << "Could not opendir(\"/\"), not freeing ramdisk";
}
struct stat old_root_info;
if (stat("/", &old_root_info) != 0) {
PLOG(ERROR) << "Could not stat(\"/\"), not freeing ramdisk";
old_root_dir.reset();
}
//从/proc/cmdline中读取androidboot.force_normal_boot=1则执行
if (ForceNormalBoot()) {
mkdir("/first_stage_ramdisk", 0755);
// SwitchRoot() must be called with a mount point as the target, so we bind mount the
// target directory to itself here.
if (mount("/first_stage_ramdisk", "/first_stage_ramdisk", nullptr, MS_BIND, nullptr) != 0) {
LOG(FATAL) << "Could not bind mount /first_stage_ramdisk to itself";
}
//调用system/core/init/switch_root.cpp方法
//以装载点为目标进行调用,因此我们在此处将装载目标目录绑定到其自身(节点/proc/mounts)
SwitchRoot("/first_stage_ramdisk");
}
//如果存在此文件,则第二阶段init将使用userdebug sepolicy并加载adb_debug.prop以允许adb root(如果设备已解锁)
if (access("/force_debuggable", F_OK) == 0) {
std::error_code ec; // to invoke the overloaded copy_file() that won't throw.
if (!fs::copy_file("/adb_debug.prop", kDebugRamdiskProp, ec) ||
!fs::copy_file("/userdebug_plat_sepolicy.cil", kDebugRamdiskSEPolicy, ec)) {
LOG(ERROR) << "Failed to setup debug ramdisk";
} else {
// setenv for second-stage init to read above kDebugRamdisk* files.
setenv("INIT_FORCE_DEBUGGABLE", "true", 1);
}
}
//调用system/core/init/first_stage_mount.cpp
//初始化一些必须的分区,主要作用是去解析/proc/device-tree/firmware/android/fstab,然后得到"/system", "/vendor", "/odm"三个目录的挂载信息
//此处会调用到system/core/fs_mgr/fs_mgr_fstab.cpp,文件系统的分区挂载信息读取解析,可后续补充梳理关注!!!
if (!DoFirstStageMount()) {
LOG(FATAL) << "Failed to mount required partitions early ...";
}
struct stat new_root_info;
if (stat("/", &new_root_info) != 0) {
PLOG(ERROR) << "Could not stat(\"/\"), not freeing ramdisk";
old_root_dir.reset();
}
if (old_root_dir && old_root_info.st_dev != new_root_info.st_dev) {
FreeRamdisk(old_root_dir.get(), old_root_info.st_dev);
}
//初始化安全框架AVB(Android Verified Boot)
//AVB主要用于防止系统文件本身被篡改,还包含了防止系统回滚的功能,以免有人试图回滚系统并利用以前的漏洞
SetInitAvbVersionInRecovery();
static constexpr uint32_t kNanosecondsPerMillisecond = 1e6;
uint64_t start_ms = start_time.time_since_epoch().count() / kNanosecondsPerMillisecond;
setenv("INIT_STARTED_AT", std::to_string(start_ms).c_str(), 1);
//此处将执行init启动的第二个步骤,就是传入参数"selinux_setup",执行SetupSelinux
const char* path = "/system/bin/init";
const char* args[] = {path, "selinux_setup", nullptr};
execv(path, const_cast<char**>(args));
....
return 1;
}
3.2.1. 序列图

3.2.2. (1.1)挂载文件系统/创建目录/节点
这些操作使用mount、mkdir、mknod命令直接实现
- 挂载文件系统:
| 设备 | 类型 | 挂载目录 |
|---|---|---|
| tmpfs | tmpfs | /dev |
| devpts | devpts | /dev/pts |
| proc | proc | /proc |
| sysfs | sysfs | /sys |
| selinuxfs | selinuxfs | /sys/fs/selinux |
| tmpfs | tmpfs | /mnt |
| tmpfs | tmpfs | /apex |
| tmpfs | tmpfs | /debug_ramdisk |
- 创建文件夹:
/dev/pts
/dev/socket
/mnt/vendor
/mnt/product
- 创建字符设备文件:
/dev/kmsg
/dev/kmsg_debug
/dev/random
/dev/urandom
/dev/ptmx
/dev/null
3.2.3. (1.2)InitKernelLogging日志初始化
3.2.3.1. 流程梳理
1.system/core/init/first_stage_init.cpp - FirstStageMain先调用SetStdioToDevNull,然后调用InitKernelLogging
2.system/core/init/util.cpp - InitKernelLogging调用android::base::InitLogging入参KernelLogger
3.system/core/base/logging.cpp - InitLogging
---> SetLogger
---> KernelLogger
3.2.3.2. 代码说明
//system/core/init/util.cpp
void SetStdioToDevNull(char** argv) {
//将stdin/stdout/stderr重定向到/dev/null,关闭默认控制台输出
int fd = open("/dev/null", O_RDWR);
....
if (fd > STDERR_FILENO) close(fd);
}
//初始化内核log
void InitKernelLogging(char** argv) {
SetFatalRebootTarget();
android::base::InitLogging(argv, &android::base::KernelLogger, InitAborter);
}
入参android::base::KernelLogger,即此处LogFunction类型的logger。查看SetLogger代码定义,此处就是执行KernelLogger方法
//system/core/base/logging.cpp
static bool gInitialized = false;
void InitLogging(char* argv[], LogFunction&& logger, AbortFunction&& aborter) {
SetLogger(std::forward<LogFunction>(logger));
SetAborter(std::forward<AbortFunction>(aborter));
//默认值false
if (gInitialized) {
return;
}
gInitialized = true;
.....
}
void KernelLogger(android::base::LogId, android::base::LogSeverity severity,
const char* tag, const char*, unsigned int, const char* msg) {
.....
//打开/dev/kmsg节点
static int klog_fd = OpenKmsg();
if (klog_fd == -1) return;
....
// The kernel's printk buffer is only 1024 bytes.
// TODO: should we automatically break up long lines into multiple lines?
// Or we could log but with something like "..." at the end?
//内核的printk缓冲区只有1024个字节
char buf[1024];
size_t size = snprintf(buf, sizeof(buf), "<%d>%s: %s\n", level, tag, msg);
if (size > sizeof(buf)) {
size = snprintf(buf, sizeof(buf), "<%d>%s: %zu-byte message too long for printk\n",
level, tag, size);
}
iovec iov[1];
iov[0].iov_base = buf;
iov[0].iov_len = size;
//日志信息写入/dev/kmsg节点
TEMP_FAILURE_RETRY(writev(klog_fd, iov, 1));
}
3.2.3.3. log打印输出原理流程
在前面的分析中,我们讲解了init log系统的初始化。关于log的输出流程,可以以下面的输出例子说明:
LOG(INFO) << "init first stage started!";
内核打印:14,1169,11337125,-;init: init first stage started!
该流程大致如下(此处不详细说明,参考文章《init进程启动源码分析指南之一》):
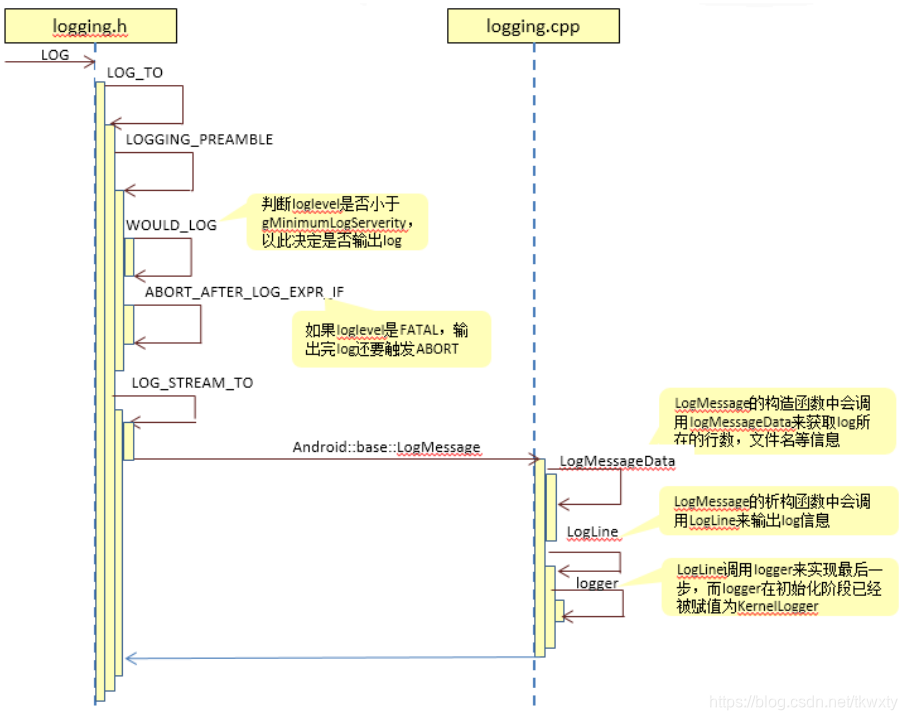
在system/core/base/include/android-base/logging.h中看到LOG(INFO)的定义:
//severity是log等级
#define LOG(severity) LOG_TO(DEFAULT, severity)
#define LOG_TO(dest, severity) LOGGING_PREAMBLE(severity) && LOG_STREAM_TO(dest, severity)
//WOULD_LOG是判断log等级是否小于设定值,以决定是否输出
//此处默认值是static LogSeverity gMinimumLogSeverity = INFO;
#define LOGGING_PREAMBLE(severity) \
(WOULD_LOG(severity) && \
ABORT_AFTER_LOG_EXPR_IF((SEVERITY_LAMBDA(severity)) == ::android::base::FATAL, true) && \
::android::base::ErrnoRestorer())
//LogMessage方法
#define LOG_STREAM_TO(dest, severity) \
::android::base::LogMessage(__FILE__, __LINE__, ::android::base::dest, \
SEVERITY_LAMBDA(severity), _LOG_TAG_INTERNAL, -1) \
.stream()
LogMessage的析构函数会调用到LogLine,从而调用到logger:
//system/core/base/logging.cpp
//创建LogMessageData对象,保存log message(行数、文件名等)
LogMessage::LogMessage(const char* file, unsigned int line, LogId id, LogSeverity severity,
const char* tag, int error)
: data_(new LogMessageData(file, line, id, severity, tag, error)) {}
LogMessage::~LogMessage() {
// Check severity again. This is duplicate work wrt/ LOG macros, but not LOG_STREAM.
//检测log等级
if (!WOULD_LOG(data_->GetSeverity())) {
return;
}
....
// Do the actual logging with the lock held.
std::lock_guard<std::mutex> lock(LoggingLock());
if (msg.find('\n') == std::string::npos) {
LogLine(data_->GetFile(), data_->GetLineNumber(), data_->GetId(), data_->GetSeverity(),
data_->GetTag(), msg.c_str());
} else {
msg += '\n';
size_t i = 0;
while (i < msg.size()) {
size_t nl = msg.find('\n', i);
msg[nl] = '\0';
LogLine(data_->GetFile(), data_->GetLineNumber(), data_->GetId(), data_->GetSeverity(),
data_->GetTag(), &msg[i]);
// Undo the zero-termination so we can give the complete message to the aborter.
msg[nl] = '\n';
i = nl + 1;
}
}
....
}
void LogMessage::LogLine(const char* file, unsigned int line, LogId id, LogSeverity severity,
const char* tag, const char* message) {
if (tag == nullptr) {
.....
//调用Logger,而参考其定义,此处就是KernelLogger
Logger()(id, severity, gDefaultTag->c_str(), file, line, message);
} else {
Logger()(id, severity, tag, file, line, message);
}
}
3.2.4. (1.3)DoFirstStageMount挂载分区
3.2.4.1. 流程梳理
1.system/core/init/first_stage_init.cpp - FirstStageMain调用DoFirstStageMount
2.system/core/init/first_stage_mount.cpp - DoFirstStageMount
---> 2.1调用FirstStageMount类Create方法
---> 调用ReadFirstStageFstab 读取fstab文件
---> system/core/fs_mgr/fs_mgr_fstab.cpp - ReadFstabFromDt()会打印日志读取失败,然后调用ReadDefaultFstab
---> GetFstabPath获取配置fstab文件路径
---> ReadFstabFromFile读取fstab文件,解析fstab文件
---> 2.2调用FirstStageMount类DoFirstStageMount方法
---> 执行FirstStageMount::MountPartitions()方法遍历fstab的分区
---> 执行FirstStageMount::MountPartition挂载单个分区
---> system/core/fs_mgr/fs_mgr.cpp - fs_mgr_do_mount_one执行mount操作挂载
---> 调用__mount然后执行mount命令实现挂载
3.2.4.2. 代码说明
//system/core/init/first_stage_mount.cpp
// Public functions
// ----------------
//公共方法,在设备树中挂载fstab指定的分区
bool DoFirstStageMount() {
//recovery模式则跳过不执行,此判断就是看是否存在/system/bin/recovery文件
if (IsRecoveryMode()) {
LOG(INFO) << "First stage mount skipped (recovery mode)";
return true;
}
//1.创建FirstStageMount类,调用构造函数和Create方法
std::unique_ptr<FirstStageMount> handle = FirstStageMount::Create();
if (!handle) {
LOG(ERROR) << "Failed to create FirstStageMount";
return false;
}
//2.调用FirstStageMount类的DoFirstStageMount
return handle->DoFirstStageMount();
}
按该方法分两部分梳理:
3.2.4.2.1. 获取fstab文件并解析
//system/core/init/first_stage_mount.cpp
// Class Definitions
// -----------------
std::unique_ptr<FirstStageMount> FirstStageMount::Create() {
//读取fastab文件
auto fstab = ReadFirstStageFstab();
.....
}
static Fstab ReadFirstStageFstab() {
Fstab fstab;
//Step 1 先从设备树文件中读取Fstab文件,如果失败了则调用ReadDefaultFstab读取默认的fstab
//从本地抓取的日志看,是直接调用的ReadDefaultFstab
if (!ReadFstabFromDt(&fstab)) {
//Step 2 读取fstab文件
if (ReadDefaultFstab(&fstab)) {
fstab.erase(std::remove_if(fstab.begin(), fstab.end(),
[](const auto& entry) {
return !entry.fs_mgr_flags.first_stage_mount;
}),
fstab.end());
} else {
LOG(INFO) << "Failed to fstab for first stage mount";
}
}
//返回结果fstab对象
return fstab;
}
//system/core/fs_mgr/fs_mgr_fstab.cpp
// fstab.<hardware.platform> in folders /odm/etc, vendor/etc, or /.
//在/odm/etc, vendor/etc, or /目录寻找fstab.<hardware.platform>文件!!!
std::string GetFstabPath() {
//硬件平台
for (const char* prop : {"hardware", "hardware.platform"}) {
std::string hw;
if (!fs_mgr_get_boot_config(prop, &hw)) continue;
//编译搜寻fstab文件
for (const char* prefix : {"/odm/etc/fstab.", "/vendor/etc/fstab.", "/fstab."}) {
std::string fstab_path = prefix + hw;
if (access(fstab_path.c_str(), F_OK) == 0) {
return fstab_path;
}
}
}
return "";
}
// Loads the fstab file and combines with fstab entries passed in from device tree.
bool ReadDefaultFstab(Fstab* fstab) {
.....
std::string default_fstab_path;
// Use different fstab paths for normal boot and recovery boot, respectively
if (access("/system/bin/recovery", F_OK) == 0) {
default_fstab_path = "/etc/recovery.fstab";
} else { // normal boot
//Step 1:正常启动,获取fastab的路径
default_fstab_path = GetFstabPath();
}
Fstab default_fstab;
if (!default_fstab_path.empty()) {
//Step 2: 从文件中读取fstab分区,解析fstab文件
ReadFstabFromFile(default_fstab_path, &default_fstab);
} else {
LINFO << __FUNCTION__ << "(): failed to find device default fstab";
}
//将读取的fstab文件结果push到fstab对象中!
for (auto&& entry : default_fstab) {
fstab->emplace_back(std::move(entry));
}
return !fstab->empty();
}
3.2.4.2.2. 挂载fstab分区
//system/core/init/first_stage_mount.cpp
bool FirstStageMount::DoFirstStageMount() {
if (!IsDmLinearEnabled() && fstab_.empty()) {
// Nothing to mount.
LOG(INFO) << "First stage mount skipped (missing/incompatible/empty fstab in device tree)";
return true;
}
if (!InitDevices()) return false;
if (!CreateLogicalPartitions()) return false;
//挂载分区
if (!MountPartitions()) return false;
return true;
}
bool FirstStageMount::MountPartitions() {
if (!TrySwitchSystemAsRoot()) return false;
if (!SkipMountingPartitions(&fstab_)) return false;
//遍历fstab文件的分区列表
for (auto current = fstab_.begin(); current != fstab_.end();) {
// We've already mounted /system above.
if (current->mount_point == "/system") {
++current;
continue;
}
Fstab::iterator end;
//挂载分区
if (!MountPartition(current, false /* erase_same_mounts */, &end)) {
if (current->fs_mgr_flags.no_fail) {
LOG(INFO) << "Failed to mount " << current->mount_point
<< ", ignoring mount for no_fail partition";
} else if (current->fs_mgr_flags.formattable) {
LOG(INFO) << "Failed to mount " << current->mount_point
<< ", ignoring mount for formattable partition";
} else {
PLOG(ERROR) << "Failed to mount " << current->mount_point;
return false;
}
}
current = end;
}
.....
}
bool FirstStageMount::MountPartition(const Fstab::iterator& begin, bool erase_same_mounts,
Fstab::iterator* end) {
.....
bool mounted = (fs_mgr_do_mount_one(*begin) == 0);
// Try other mounts with the same mount point.
Fstab::iterator current = begin + 1;
for (; current != fstab_.end() && current->mount_point == begin->mount_point; current++) {
if (!mounted) {
// blk_device is already updated to /dev/dm-<N> by SetUpDmVerity() above.
// Copy it from the begin iterator.
current->blk_device = begin->blk_device;
//挂载分区
mounted = (fs_mgr_do_mount_one(*current) == 0);
}
}
if (erase_same_mounts) {
current = fstab_.erase(begin, current);
}
if (end) {
*end = current;
}
return mounted;
}
//system/core/fs_mgr/fs_mgr.cpp
int fs_mgr_do_mount_one(const FstabEntry& entry, const std::string& mount_point) {
// Run fsck if needed
prepare_fs_for_mount(entry.blk_device, entry);
int ret =
//挂载
__mount(entry.blk_device, mount_point.empty() ? entry.mount_point : mount_point, entry);
if (ret) {
ret = (errno == EBUSY) ? FS_MGR_DOMNT_BUSY : FS_MGR_DOMNT_FAILED;
}
return ret;
}
static int __mount(const std::string& source, const std::string& target, const FstabEntry& entry) {
// We need this because sometimes we have legacy symlinks that are
// lingering around and need cleaning up.
struct stat info;
if (lstat(target.c_str(), &info) == 0 && (info.st_mode & S_IFMT) == S_IFLNK) {
unlink(target.c_str());
}
mkdir(target.c_str(), 0755);
errno = 0;
unsigned long mountflags = entry.flags;
int ret = 0;
int save_errno = 0;
do {
if (save_errno == EAGAIN) {
PINFO << "Retrying mount (source=" << source << ",target=" << target
<< ",type=" << entry.fs_type << ")=" << ret << "(" << save_errno << ")";
}
//执行挂载命令
ret = mount(source.c_str(), target.c_str(), entry.fs_type.c_str(), mountflags,
entry.fs_options.c_str());
save_errno = errno;
} while (ret && save_errno == EAGAIN);
.....
//日志打印,可在内核日志中查看
PINFO << __FUNCTION__ << "(source=" << source << source_missing << ",target=" << target
<< target_missing << ",type=" << entry.fs_type << ")=" << ret;
return ret;
}
3.3. (2)SetupSelinux – 权限策略初始化配置
在上一个步骤执行的最后,会调用”/system/bin/init”入参selinux_setup,进入第二个步骤selinux的初始化设置,调用SetupSelinux方法。 在执行结束后入参second_stage,调用SecondStageMain方法
3.3.1. 序列图

3.3.2. 编译SElinux方式
编译命令:make sepolicy -j48或make selinux_policy -j48
如果make编译过了,可使用ninja编译,不到一分钟就可以编译完成:
time prebuilts/build-tools/linux-x86/bin/ninja -f out/combined-XXXX.ninja -j48 selinux_policytime prebuilts/build-tools/linux-x86/bin/ninja -f out/combined-XXXX.ninja -j48 sepolicy.recovery
编译结果会把生成的文件\out\target\product\XXXX\obj\ETC\vendor_sepolicy.cil_intermediates\vendor_sepolicy.cilpush到out\target\product\XXXX\vendor\etc\selinux\vendor_sepolicy.cil(文件系统/vendor/etc/selinux) 目录下
3.3.3. 流程说明
1.system/core/init/first_stage_init.cpp - FirstStageMain调用init程序,入参selinux_setup
2.system/core/init/main.cpp - main函数执行SetupSelinux
3.system/core/init/selinux.cpp - SetupSelinux
---> 3.1 调用SelinuxInitialize()
---> 3.1.1 调用LoadPolicy()
---> 调用IsSplitPolicyDevice()判断是否存在"/system/etc/selinux/plat_sepolicy.cil"文件,正常都存在该文件
---> 调用LoadSplitPolicy(),此方法最主要的就是调用FindPrecompiledSplitPolicy
---> FindPrecompiledSplitPolicy依次从/vendor/etc/selinux/precompiled_sepolicy和/odm/etc/selinux/precompiled_sepolicy中寻找selinux预编译文件,一般是从/vendor/etc/selinux/ precompiled_sepolicy中获取selinux文件!
---> 调用selinux_android_load_policy_from_fd方法,入参selinux文件
---> external/selinux/libselinux/src/android/android_platform.c - selinux_android_load_policy_from_fd
---> external/selinux/libselinux/src/load_policy.c - security_load_policy将sepolicy写入到selinuxfs文件系统的load文件中
---> 3.1.2 调用IsEnforcing,然后调用StatusFromCmdline()获取android自定义的selinux权限状态,即从/proc/cmdline中读取androidboot.selinux的值
---> 调用security_setenforce,入参IsEnforcing,设置当前selinux状态,将其值0/1写入/sys/fs/selinux/enforce节点
---> 将0写入/sys/fs/selinux/checkreqprot节点,该值决定selinux通过程序"1"还是内核"0"响应进行安全检查
---> 3.2 执行"/system/bin/init",入参second_stage,进入下一个步骤
3.3.4. 代码说明
//system/core/init/first_stage_init.cpp
int FirstStageMain(int argc, char** argv) {
.....
//此处将执行init启动的第二个步骤,就是传入参数"selinux_setup",执行SetupSelinux
const char* path = "/system/bin/init";
const char* args[] = {path, "selinux_setup", nullptr};
execv(path, const_cast<char**>(args));
....
}
//system/core/init/selinux.cpp
// This function initializes SELinux then execs init to run in the init SELinux context.
int SetupSelinux(char** argv) {
//初始化kernel内核日志
InitKernelLogging(argv);
//异常重启
if (REBOOT_BOOTLOADER_ON_PANIC) {
InstallRebootSignalHandlers();
}
// Set up SELinux, loading the SELinux policy.
//将selinux日志重定向到内核日志输出(dev/kmsg)
SelinuxSetupKernelLogging();
//Step 1:初始化selinux策略
SelinuxInitialize();
.....
//Step 2:继续下一个init启动步骤,入参second_stage,调用SecondStageMain
const char* path = "/system/bin/init";
const char* args[] = {path, "second_stage", nullptr};
execv(path, const_cast<char**>(args));
// execv() only returns if an error happened, in which case we
// panic and never return from this function.
PLOG(FATAL) << "execv(\"" << path << "\") failed";
return 1;
}
//IsSplitPolicyDevice()判断是否存在"/system/etc/selinux/plat_sepolicy.cil"文件,正常都存在该文件,执行前者
//LoadSplitPolicy最主要的就是调用FindPrecompiledSplitPolicy:
//依次从/vendor/etc/selinux/precompiled_sepolicy"和"/odm/etc/selinux/precompiled_sepolicy"中寻找selinux预编译文件
//一般是从"/vendor/etc/selinux/precompiled_sepolicy"中获取selinux文件!
constexpr const char plat_policy_cil_file[] = "/system/etc/selinux/plat_sepolicy.cil";
bool IsSplitPolicyDevice() {
return access(plat_policy_cil_file, R_OK) != -1;
}
bool LoadPolicy() {
return IsSplitPolicyDevice() ? LoadSplitPolicy() : LoadMonolithicPolicy();
}
void SelinuxInitialize() {
Timer t;
LOG(INFO) << "Loading SELinux policy";
//Step 1:加载policy文件
if (!LoadPolicy()) {
LOG(FATAL) << "Unable to load SELinux policy";
}
//获取内核selinux状态
bool kernel_enforcing = (security_getenforce() == 1);
//获取Android自定义selinux状态
bool is_enforcing = IsEnforcing();
//判断是否一样,设置当前selinux状态,就是将值0/1写入到/sys/fs/selinux/enforce节点
if (kernel_enforcing != is_enforcing) {
if (security_setenforce(is_enforcing)) {
PLOG(FATAL) << "security_setenforce(%s) failed" << (is_enforcing ? "true" : "false");
}
}
//设置节点0,该值决定selinux通过程序"1"还是内核"0"响应进行安全检查
if (auto result = WriteFile("/sys/fs/selinux/checkreqprot", "0"); !result) {
LOG(FATAL) << "Unable to write to /sys/fs/selinux/checkreqprot: " << result.error();
}
// init's first stage can't set properties, so pass the time to the second stage.
//获取selinux策略加载时间并设置到环境遍历INIT_SELINUX_TOOK
setenv("INIT_SELINUX_TOOK", std::to_string(t.duration().count()).c_str(), 1);
}
bool LoadSplitPolicy() {
// 在adb shell查看echo $INIT_FORCE_DEBUGGABLE值为空,所以use_userdebug_policy是false
const char* force_debuggable_env = getenv("INIT_FORCE_DEBUGGABLE");
bool use_userdebug_policy =
((force_debuggable_env && "true"s == force_debuggable_env) &&
AvbHandle::IsDeviceUnlocked() && access(kDebugRamdiskSEPolicy, F_OK) == 0);
if (use_userdebug_policy) {
LOG(WARNING) << "Using userdebug system sepolicy";
}
std::string precompiled_sepolicy_file;
//核心函数FindPrecompiledSplitPolicy
if (!use_userdebug_policy && FindPrecompiledSplitPolicy(&precompiled_sepolicy_file)) {
unique_fd fd(open(precompiled_sepolicy_file.c_str(), O_RDONLY | O_CLOEXEC | O_BINARY));
if (fd != -1) {
//核心函数selinux_android_load_policy_from_fd
//入参是打开/vendor/etc/selinux/precompiled_sepolicy的fd节点
if (selinux_android_load_policy_from_fd(fd, precompiled_sepolicy_file.c_str()) < 0) {
LOG(ERROR) << "Failed to load SELinux policy from " << precompiled_sepolicy_file;
return false;
}
//返回
return true;
}
}
// No suitable precompiled policy could be loaded
.....
return true;
}
//主要是对比两对文件的sha256值,如果一致则返回true(一般返回true)
bool FindPrecompiledSplitPolicy(std::string* file) {
file->clear();
//依次从/vendor/etc/selinux/precompiled_sepolicy和/odm/etc/selinux/precompiled_sepolicy中寻找selinux预编译文件,
//一般是从/vendor/etc/selinux/precompiled_sepolicy中获取selinux文件
//file值是/vendor/etc/selinux/precompiled_sepolicy
static constexpr const char vendor_precompiled_sepolicy[] =
"/vendor/etc/selinux/precompiled_sepolicy";
static constexpr const char odm_precompiled_sepolicy[] =
"/odm/etc/selinux/precompiled_sepolicy";
if (access(odm_precompiled_sepolicy, R_OK) == 0) {
*file = odm_precompiled_sepolicy;
} else if (access(vendor_precompiled_sepolicy, R_OK) == 0) {
*file = vendor_precompiled_sepolicy;
} else {
PLOG(INFO) << "No precompiled sepolicy";
return false;
}
//此处对比/system/etc/selinux/plat_sepolicy_and_mapping.sha256和/vendor/etc/selinux/precompiled_sepolicy.plat_sepolicy_and_mapping.sha256的值
std::string actual_plat_id;
if (!ReadFirstLine("/system/etc/selinux/plat_sepolicy_and_mapping.sha256", &actual_plat_id)) {
PLOG(INFO) << "Failed to read "
"/system/etc/selinux/plat_sepolicy_and_mapping.sha256";
return false;
}
//此处对比/product/etc/selinux/product_sepolicy_and_mapping.sha256和/vendor/etc/selinux/precompiled_sepolicy.product_sepolicy_and_mapping.sha256的值
std::string actual_product_id;
if (!ReadFirstLine("/product/etc/selinux/product_sepolicy_and_mapping.sha256",
&actual_product_id)) {
PLOG(INFO) << "Failed to read "
"/product/etc/selinux/product_sepolicy_and_mapping.sha256";
return false;
}
std::string precompiled_plat_id;
std::string precompiled_plat_sha256 = *file + ".plat_sepolicy_and_mapping.sha256";
if (!ReadFirstLine(precompiled_plat_sha256.c_str(), &precompiled_plat_id)) {
PLOG(INFO) << "Failed to read " << precompiled_plat_sha256;
file->clear();
return false;
}
std::string precompiled_product_id;
std::string precompiled_product_sha256 = *file + ".product_sepolicy_and_mapping.sha256";
if (!ReadFirstLine(precompiled_product_sha256.c_str(), &precompiled_product_id)) {
PLOG(INFO) << "Failed to read " << precompiled_product_sha256;
file->clear();
return false;
}
if (actual_plat_id.empty() || actual_plat_id != precompiled_plat_id ||
actual_product_id.empty() || actual_product_id != precompiled_product_id) {
file->clear();
return false;
}
return true;
}
本地在设备的文件目录下查看这两对文件的内容值:
Product:/system/etc/selinux # more plat_sepolicy_and_mapping.sha256
ee0de9c3569fc8123fdbe7ab09cbf241cbf14933b745cbed1e5d689608890258
Product:/system/etc/selinux #
Product:/ # cd vendor/etc/selinux/
Product:/vendor/etc/selinux # more precompiled_sepolicy.plat_sepolicy_and_mapping.sha256
ee0de9c3569fc8123fdbe7ab09cbf241cbf14933b745cbed1e5d689608890258
Product:/vendor/etc/selinux #
Product:/vendor/etc/selinux # more precompiled_sepolicy.product_sepolicy_and_mapping.sha256
e3b0c44298fc1c149afbf4c8996fb92427ae41e4649b934ca495991b7852b855
Product:/vendor/etc/selinux # more /pro
proc/ product/ product_services
Product:/vendor/etc/selinux # more /produ
product/ product_services
Product:/vendor/etc/selinux # more /product/etc/selinux/product_sepolicy_and_mapping.sha256
e3b0c44298fc1c149afbf4c8996fb92427ae41e4649b934ca495991b7852b855
在之后就是调用selinux_android_load_policy_from_fd方法,入参就是FindPrecompiledSplitPolicy方法查找到的”/vendor/etc/selinux/precompiled_sepolicy”文件。
//external/selinux/libselinux/src/android/android_platform.c
int selinux_android_load_policy_from_fd(int fd, const char *description)
{
int rc;
struct stat sb;
void *map = NULL;
static int load_successful = 0;
...
set_selinuxmnt(SELINUXMNT);
//将fd文件状态复制到sb对象
if (fstat(fd, &sb) < 0) {
selinux_log(SELINUX_ERROR, "SELinux: Could not stat %s: %s\n",
description, strerror(errno));
return -1;
}
//文件映射到内存
map = mmap(NULL, sb.st_size, PROT_READ, MAP_PRIVATE, fd, 0);
if (map == MAP_FAILED) {
selinux_log(SELINUX_ERROR, "SELinux: Could not map %s: %s\n",
description, strerror(errno));
return -1;
}
//该函数由selinux.h定义,它将此map即sepolicy文件加载到/sys/fs/selinux/load内核中
//第一个步骤中创建了selinuxfs文件系统,目录就是/sys/fs/selinux
//由于/sys/fs/selinux是由内核空间的SELinux LSM模块导出来的文件系统接口,因此当我们将安全策略写入到位于该文件系统中的load文件时,就相当于是将安全策略从用户空间加载到SELinux LSM模块中去了。以后SELinux LSM模块中的Security Server就可以通过它来进行安全检查
//external/selinux/libselinux/src/load_policy.c
rc = security_load_policy(map, sb.st_size);
if (rc < 0) {
selinux_log(SELINUX_ERROR, "SELinux: Could not load policy: %s\n",
strerror(errno));
munmap(map, sb.st_size);
return -1;
}
munmap(map, sb.st_size);
selinux_log(SELINUX_INFO, "SELinux: Loaded policy from %s\n", description);
load_successful = 1;
return 0;
}
3.4. (3)SecondStageMain – 启动init进程第三阶段
3.4.1. 流程说明
1.system/core/init/selinux.cpp - SetupSelinux调用init程序,执行"/system/bin/init",入参second_stage,进入下一个步骤
2.system/core/init/main.cpp - main函数执行SecondStageMain
3.system/core/init/init.cpp - SecondStageMain
---> (1) property_init 读取属性文件写入到"/dev/__properties__/property_info"然后加载到共享内存
---> (2) process_kernel_dt 处理设备树中定义的属性,设置并赋值为"ro.boot.***"属性
---> (3) process_kernel_cmdline 读取proc/cmdline并将"androidboot.***"的值设置为"ro.boot.***"属性
---> (4) SelabelInitialize()初始化selinux,SelinuxRestoreContext()恢复selinux上下文信息
---> (5) InstallSignalFdHandler信号处理
---> (6) property_load_boot_defaults和StartPropertyService加载开机默认属性配置以及启动属性服务
---> (7) LoadBootScripts加载解析init.rc等rc文件
---> (8) 通过action机制按rc文件的session顺序运行rc文件"on early-init -> on init -> on late-init"
3.4.2. 序列图

3.4.3. 入口函数代码说明
//system/core/init/selinux.cpp
int SetupSelinux(char** argv) {
.....
//此处将执行init启动的第三个步骤,就是传入参数"second_stage"
//然后执行system/core/init/main.cpp - main函数的SecondStageMain
const char* path = "/system/bin/init";
const char* args[] = {path, "second_stage", nullptr};
execv(path, const_cast<char**>(args));
// execv() only returns if an error happened, in which case we
// panic and never return from this function.
PLOG(FATAL) << "execv(\"" << path << "\") failed";
return 1;
}
执行system/core/init/main.cpp - main函数的SecondStageMain:
//system/core/init/init.cpp
int SecondStageMain(int argc, char** argv) {
.....
//内核日志打印
InitKernelLogging(argv);
LOG(INFO) << "init second stage started!";
//设置init进程及fork的子进程的优先级(-1000最高)
if (auto result = WriteFile("/proc/1/oom_score_adj", "-1000"); !result) {
LOG(ERROR) << "Unable to write -1000 to /proc/1/oom_score_adj: " << result.error();
}
//从/proc/cmdline中读取androidboot.seccomp是否是global值以启动全局seccomp
//Secure Computing mode是Linux内核提供的一种安全机制,用于在用户态应用程序执行系统调用时进行过滤和限制。
//其原理是基于对系统调用号的过滤和限制,以及对系统调用参数的校验
GlobalSeccomp();
//设置所有进程都可以访问的会话密钥环
keyctl_get_keyring_ID(KEY_SPEC_SESSION_KEYRING, 1);
//创建 /dev/.booting 文件,就是个标记,表示booting进行中
close(open("/dev/.booting", O_WRONLY | O_CREAT | O_CLOEXEC, 0000));
//--------Step 1: 初始化属性系统,并从指定文件读取属性
property_init();
// If arguments are passed both on the command line and in DT,
// properties set in DT always have priority over the command-line ones.
//处理DT属性,DT即device-tree设备树,这里面记录自己的硬件配置和系统运行参数
process_kernel_dt();
//处理命令行属性,即/proc/cmdline
process_kernel_cmdline();
// Propagate the kernel variables to internal variables
// used by init as well as the current required properties.
//将内核变量传播到init使用的内部变量以及当前所需的属性
// 处理一些其他的属性(ro属性)
export_kernel_boot_props();
// Make the time that init started available for bootstat to log.
property_set("ro.boottime.init", getenv("INIT_STARTED_AT"));
property_set("ro.boottime.init.selinux", getenv("INIT_SELINUX_TOOK"));
// Set libavb version for Framework-only OTA match in Treble build.
const char* avb_version = getenv("INIT_AVB_VERSION");
if (avb_version) property_set("ro.boot.avb_version", avb_version);
// 在adb shell查看echo $INIT_FORCE_DEBUGGABLE值为空,所以force_debuggable_env是false,所以load_debug_prop是默认值false
const char* force_debuggable_env = getenv("INIT_FORCE_DEBUGGABLE");
if (force_debuggable_env && AvbHandle::IsDeviceUnlocked()) {
load_debug_prop = "true"s == force_debuggable_env;
}
// Clean up our environment.
//上面将环境变量设置到ro属性中,此处清空环境变量
unsetenv("INIT_STARTED_AT");
unsetenv("INIT_SELINUX_TOOK");
unsetenv("INIT_AVB_VERSION");
unsetenv("INIT_FORCE_DEBUGGABLE");
//-----Step 2:进行Selinux第二阶段工作
//将selinux日志重定向到内核日志输出(dev/kmsg)
SelinuxSetupKernelLogging();
//第二阶段初始化selinux
SelabelInitialize();
//恢复安全上下文,进行SELinux第二阶段并恢复一些文件安全上下文
//恢复相关文件的安全上下文,因为这些文件是在SELinux安全机制初始化前创建的,所以需要重新恢复上下文
SelinuxRestoreContext();
//-----Step 3: 创建epoll句柄并初始化子进程终止信号处理函数
//要是创建handler处理子进程终止信号,注册一个signal到epoll进行监听,进行子继承处理
Epoll epoll;
if (auto result = epoll.Open(); !result) {
PLOG(FATAL) << result.error();
}
InstallSignalFdHandler(&epoll);
//-----Step 4:加载开机默认属性配置以及启动属性服务(同第一步都是系统属性相关)
property_load_boot_defaults(load_debug_prop);
UmountDebugRamdisk();
fs_mgr_vendor_overlay_mount_all();
export_oem_lock_status();
// 设置其他系统属性并开启系统属性服务
StartPropertyService(&epoll);
MountHandler mount_handler(&epoll);
//为USB存储设置udc Contorller, sys/class/udc
set_usb_controller();
//匹配命令和函数之间的对应关系
const BuiltinFunctionMap function_map;
Action::set_function_map(&function_map);
if (!SetupMountNamespaces()) {
PLOG(FATAL) << "SetupMountNamespaces failed";
}
// 初始化文件上下文
subcontexts = InitializeSubcontexts();
//-----Step 5: 解析init.rc等文件,建立rc文件的action 、service,启动其他进程
ActionManager& am = ActionManager::GetInstance();
ServiceList& sm = ServiceList::GetInstance();
LoadBootScripts(am, sm);
// Make the GSI status available before scripts start running.
//当GSI脚本running时,确保GSI状态可用
if (android::gsi::IsGsiRunning()) {
property_set("ro.gsid.image_running", "1");
} else {
property_set("ro.gsid.image_running", "0");
}
//Action机制,添加action
am.QueueBuiltinAction(SetupCgroupsAction, "SetupCgroups");
// 执行rc文件中触发器为 on early-init 的语句
am.QueueEventTrigger("early-init");
// Queue an action that waits for coldboot done so we know ueventd has set up all of /dev...
// 等冷插拔设备初始化完成
am.QueueBuiltinAction(wait_for_coldboot_done_action, "wait_for_coldboot_done");
// ... so that we can start queuing up actions that require stuff from /dev.
//开始查询来自 /dev的 action
am.QueueBuiltinAction(MixHwrngIntoLinuxRngAction, "MixHwrngIntoLinuxRng");
am.QueueBuiltinAction(SetMmapRndBitsAction, "SetMmapRndBits");
am.QueueBuiltinAction(SetKptrRestrictAction, "SetKptrRestrict");
//设备组合键的初始化操作
Keychords keychords;
am.QueueBuiltinAction(
[&epoll, &keychords](const BuiltinArguments& args) -> Result<Success> {
for (const auto& svc : ServiceList::GetInstance()) {
keychords.Register(svc->keycodes());
}
keychords.Start(&epoll, HandleKeychord);
return Success();
},
"KeychordInit");
//在屏幕上显示Android 静态LOGO
am.QueueBuiltinAction(console_init_action, "console_init");
// Trigger all the boot actions to get us started.
//执行rc文件中触发器为on init的语句
am.QueueEventTrigger("init");
// Starting the BoringSSL self test, for NIAP certification compliance.
am.QueueBuiltinAction(StartBoringSslSelfTest, "StartBoringSslSelfTest");
// Repeat mix_hwrng_into_linux_rng in case /dev/hw_random or /dev/random
// wasn't ready immediately after wait_for_coldboot_done
am.QueueBuiltinAction(MixHwrngIntoLinuxRngAction, "MixHwrngIntoLinuxRng");
// Initialize binder before bringing up other system services
am.QueueBuiltinAction(InitBinder, "InitBinder");
// Don't mount filesystems or start core system services in charger mode.
//当设备处于充电模式时,不需要mount文件系统或者启动系统服务
//充电模式下,将charger假如执行队列,否则把late-init加入执行队列
std::string bootmode = GetProperty("ro.bootmode", "");
if (bootmode == "charger") {
am.QueueEventTrigger("charger");
} else {
am.QueueEventTrigger("late-init");
}
// Run all property triggers based on current state of the properties.
// 基于属性当前状态 运行所有的属性触发器.
am.QueueBuiltinAction(queue_property_triggers_action, "queue_property_triggers");
while (true) {
// By default, sleep until something happens.
auto epoll_timeout = std::optional<std::chrono::milliseconds>{};
if (do_shutdown && !shutting_down) {
do_shutdown = false;
if (HandlePowerctlMessage(shutdown_command)) {
shutting_down = true;
}
}
//依次执行每个action中携带command对应的执行函数
if (!(waiting_for_prop || Service::is_exec_service_running())) {
am.ExecuteOneCommand();
}
if (!(waiting_for_prop || Service::is_exec_service_running())) {
if (!shutting_down) {
auto next_process_action_time = HandleProcessActions();
// If there's a process that needs restarting, wake up in time for that.
if (next_process_action_time) {
epoll_timeout = std::chrono::ceil<std::chrono::milliseconds>(
*next_process_action_time - boot_clock::now());
if (*epoll_timeout < 0ms) epoll_timeout = 0ms;
}
}
// If there's more work to do, wake up again immediately.
if (am.HasMoreCommands()) epoll_timeout = 0ms;
}
// 循环等待事件发生
if (auto result = epoll.Wait(epoll_timeout); !result) {
LOG(ERROR) << result.error();
}
}
return 0;
}
3.4.4. Step 1:property_init初始化属性系统,并从指定文件读取属性
system/core/init/property_service.cpp - property_init
---> mkdir创建/dev/__properties__文件目录
---> 调用CreateSerializedPropertyInfo读取各个目录下的属性权限property_contexts文件,解析写到property_infos容器中,然后写到/dev/__properties__/property_info
---> 调用__system_property_area_init初始化属性内存共享区域
---> bionic/libc/bionic/system_property_api.cpp - __system_property_area_init
---> bionic/libc/system_properties/system_properties.cpp - AreaInit
---> bionic/libc/system_properties/contexts_serialized.cpp - Initialize然后调用InitializeProperties(),然后调用property_info_area_file_.LoadDefaultPath()
---> system/core/property_service/libpropertyinfoparser/property_info_parser.cpp - LoadDefaultPath
---> 调用LoadPath("/dev/__properties__/property_info")
---> 通过mmap将"/dev/__properties__/property_info"加载到共享内存
---> 调用selinux_android_restorecon恢复/dev/__properties__/property_info的安全上下文信息
//system/core/init/property_service.cpp
void property_init() {
//创建/dev/__properties__文件目录
mkdir("/dev/__properties__", S_IRWXU | S_IXGRP | S_IXOTH);
CreateSerializedPropertyInfo();
//bionic/libc/bionic/system_property_api.cpp
//初始化属性内存共享区域
//该方法经过一系列的方法调用,最终通过mmap()将/dev/__properties__/property_info加载到共享内存
if (__system_property_area_init()) {
LOG(FATAL) << "Failed to initialize property area";
}
if (!property_info_area.LoadDefaultPath()) {
LOG(FATAL) << "Failed to load serialized property info file";
}
}
//读取各个目录下的属性权限property_contexts文件,解析写到property_infos容器中
void CreateSerializedPropertyInfo() {
auto property_infos = std::vector<PropertyInfoEntry>();
if (access("/system/etc/selinux/plat_property_contexts", R_OK) != -1) {
if (!LoadPropertyInfoFromFile("/system/etc/selinux/plat_property_contexts",
&property_infos)) {
return;
}
// Don't check for failure here, so we always have a sane list of properties.
// E.g. In case of recovery, the vendor partition will not have mounted and we
// still need the system / platform properties to function.
if (!LoadPropertyInfoFromFile("/vendor/etc/selinux/vendor_property_contexts",
&property_infos)) {
// Fallback to nonplat_* if vendor_* doesn't exist.
LoadPropertyInfoFromFile("/vendor/etc/selinux/nonplat_property_contexts",
&property_infos);
}
if (access("/product/etc/selinux/product_property_contexts", R_OK) != -1) {
LoadPropertyInfoFromFile("/product/etc/selinux/product_property_contexts",
&property_infos);
}
if (access("/odm/etc/selinux/odm_property_contexts", R_OK) != -1) {
LoadPropertyInfoFromFile("/odm/etc/selinux/odm_property_contexts", &property_infos);
}
} else {
if (!LoadPropertyInfoFromFile("/plat_property_contexts", &property_infos)) {
return;
}
if (!LoadPropertyInfoFromFile("/vendor_property_contexts", &property_infos)) {
// Fallback to nonplat_* if vendor_* doesn't exist.
LoadPropertyInfoFromFile("/nonplat_property_contexts", &property_infos);
}
LoadPropertyInfoFromFile("/product_property_contexts", &property_infos);
LoadPropertyInfoFromFile("/odm_property_contexts", &property_infos);
}
auto serialized_contexts = std::string();
auto error = std::string();
//property_infos写到serialized_contexts中
if (!BuildTrie(property_infos, "u:object_r:default_prop:s0", "string", &serialized_contexts,
&error)) {
LOG(ERROR) << "Unable to serialize property contexts: " << error;
return;
}
//将serialized_contexts写到/dev/__properties__/property_info
constexpr static const char kPropertyInfosPath[] = "/dev/__properties__/property_info";
if (!WriteStringToFile(serialized_contexts, kPropertyInfosPath, 0444, 0, 0, false)) {
PLOG(ERROR) << "Unable to write serialized property infos to file";
}
//同下一个步骤SelinuxRestoreContext的流程
selinux_android_restorecon(kPropertyInfosPath, 0);
}
3.4.5. Step 2:进行Selinux第二阶段工作
从上面的入口函数看,继初始化SElinux之后的第二阶段调用到的是以下几个函数,其中第一个SelinuxSetupKernelLogging是日志输出。主要是后面两个函数:
//system/core/init/init.cpp
int SecondStageMain(int argc, char** argv) {
.....
//-----Step 2:进行Selinux第二阶段工作
//将selinux日志重定向到内核日志输出(dev/kmsg)
SelinuxSetupKernelLogging();
//第二阶段初始化selinux
SelabelInitialize();
//恢复安全上下文,进行SELinux第二阶段并恢复一些文件安全上下文
//恢复相关文件的安全上下文,因为这些文件是在SELinux安全机制初始化前创建的,所以需要重新恢复上下文
SelinuxRestoreContext();
...
}
//system/core/init/selinux.cpp
//selinux_android_file_context_handle()的运行时间约为10+ms,因此我们希望缓存其值。
//selinux_android_restorecon()还需要一个sehandle来查找文件上下文。它将创建并存储自己的副本,但selinux_android_set_sehandle()可用于提供一个副本,从而消除了对selinux_adroid_file_context_handle()的额外调用。
void SelabelInitialize() {
//均是external/selinux/libselinux/src/android/android_platform.c的函数
sehandle = selinux_android_file_context_handle();
//只是做了保存上面sehandle作为android_platform.c里面的全局变量
selinux_android_set_sehandle(sehandle);
}
3.4.5.1. SelabelInitialize->selinux_android_file_context_handle流程
详细的分析参考:SEAndroid流程分析 SEAndroid流程分析
selinux_android_file_context_handle()返回的是一个保存了/file_conetxts各种信息及相关处理函数的struct selabel_handle指针,并将其保存在静态全局指针fc_sehandle中,这部分系统中的文件安全上下文有关
system/core/init/init.cpp - SecondStageMain
---> system/core/init/selinux.cpp - SelabelInitialize
---> external/selinux/libselinux/src/android/android_platform.c - selinux_android_file_context_handle 将四个目录下的file_contexts文件添加到seopts_file容器中
(/system/etc/selinux/plat_file_contexts、/product/etc/selinux/product_file_contexts、/vendor/etc/selinux/vendor_file_contexts、/odm/etc/selinux/odm_file_contexts)
---> 调用selinux_android_file_context
---> external/selinux/libselinux/src/label.c - selabel_open 分配一块内存,将入参即file_context文件列表内容写到这块内存中,用于后面调用方法入参
---> 调用initfuncs[backend])(rec, opts, nopts),其中backend入参是0,所以会调用到下面的第一个方法CONFIG_FILE_BACKEND(selabel_file_init)
---> external/selinux/libselinux/src/label_file.c - selabel_file_init
---> 调用init(rec, opts, nopts)
---> 遍历file_context文件列表调用process_file
---> (1)调用open_file打开file_contexts文件
---> (2)调用process_text_file,然后while循环逐行读取调用process_line
---> external/selinux/libselinux/src/label_file.h - process_line解析file_context文件内容保存上下文
//external/selinux/libselinux/src/android/android_platform.c
static const char *const sepolicy_file = "/sepolicy";
//此处的selinux_opt是结构体对象(external/selinux/libselinux/include/selinux/selinux.h)
struct selinux_opt {
int type;
const char *value;
};
static const struct selinux_opt seopts_file_plat[] = {
{ SELABEL_OPT_PATH, "/system/etc/selinux/plat_file_contexts" },
{ SELABEL_OPT_PATH, "/plat_file_contexts" }
};
static const struct selinux_opt seopts_file_product[] = {
{ SELABEL_OPT_PATH, "/product/etc/selinux/product_file_contexts" },
{ SELABEL_OPT_PATH, "/product_file_contexts" }
};
static const struct selinux_opt seopts_file_vendor[] = {
{ SELABEL_OPT_PATH, "/vendor/etc/selinux/vendor_file_contexts" },
{ SELABEL_OPT_PATH, "/vendor_file_contexts" },
// TODO: remove nonplat* when no need to retain backward compatibility.
{ SELABEL_OPT_PATH, "/vendor/etc/selinux/nonplat_file_contexts" },
{ SELABEL_OPT_PATH, "/nonplat_file_contexts" }
};
static const struct selinux_opt seopts_file_odm[] = {
{ SELABEL_OPT_PATH, "/odm/etc/selinux/odm_file_contexts" },
{ SELABEL_OPT_PATH, "/odm_file_contexts" }
};
//此函数就是将四个目录下的file_contexts文件添加到seopts_file变量中
struct selabel_handle* selinux_android_file_context_handle(void)
{
struct selinux_opt seopts_file[MAX_FILE_CONTEXT_SIZE];//值为4
int size = 0;
unsigned int i;
for (i = 0; i < ARRAY_SIZE(seopts_file_plat); i++) {
if (access(seopts_file_plat[i].value, R_OK) != -1) {
seopts_file[size++] = seopts_file_plat[i];
break;
}
}
for (i = 0; i < ARRAY_SIZE(seopts_file_product); i++) {
if (access(seopts_file_product[i].value, R_OK) != -1) {
seopts_file[size++] = seopts_file_product[i];
break;
}
}
for (i = 0; i < ARRAY_SIZE(seopts_file_vendor); i++) {
if (access(seopts_file_vendor[i].value, R_OK) != -1) {
seopts_file[size++] = seopts_file_vendor[i];
break;
}
}
for (i = 0; i < ARRAY_SIZE(seopts_file_odm); i++) {
if (access(seopts_file_odm[i].value, R_OK) != -1) {
seopts_file[size++] = seopts_file_odm[i];
break;
}
}
//将填充好的变量作为入参,调用selinux_android_file_context
return selinux_android_file_context(seopts_file, size);
}
static struct selabel_handle* selinux_android_file_context(const struct selinux_opt *opts,
unsigned nopts)
{
struct selabel_handle *sehandle;
struct selinux_opt fc_opts[nopts + 1];
//将入参opts拷贝到fc_opts变量中
memcpy(fc_opts, opts, nopts*sizeof(struct selinux_opt));
fc_opts[nopts].type = SELABEL_OPT_BASEONLY;
fc_opts[nopts].value = (char *)1;
//宏定义#define SELABEL_CTX_FILE 0
sehandle = selabel_open(SELABEL_CTX_FILE, fc_opts, ARRAY_SIZE(fc_opts));
if (!sehandle) {
selinux_log(SELINUX_ERROR, "%s: Error getting file context handle (%s)\n",
__FUNCTION__, strerror(errno));
return NULL;
}
if (!compute_file_contexts_hash(fc_digest, opts, nopts)) {
selabel_close(sehandle);
return NULL;
}
selinux_log(SELINUX_INFO, "SELinux: Loaded file_contexts\n");
return sehandle;
}
//external/selinux/libselinux/src/label.c
struct selabel_handle *selabel_open(unsigned int backend,
const struct selinux_opt *opts,
unsigned nopts)
{
struct selabel_handle *rec = NULL;
if (backend >= ARRAY_SIZE(initfuncs)) {
errno = EINVAL;
goto out;
}
if (!initfuncs[backend]) {
errno = ENOTSUP;
goto out;
}
rec = (struct selabel_handle *)malloc(sizeof(*rec));
if (!rec)
goto out;
//分配一块内存,将入参即file_context文件列表内容写到rec中
memset(rec, 0, sizeof(*rec));
rec->backend = backend;
rec->validating = selabel_is_validate_set(opts, nopts);
rec->digest = selabel_is_digest_set(opts, nopts, rec->digest);
//调用initfuncs,其中backend入参是0,所以会调用到下面的第一个方法CONFIG_FILE_BACKEND(selabel_file_init)
if ((*initfuncs[backend])(rec, opts, nopts)) {
selabel_close(rec);
rec = NULL;
}
out:
return rec;
}
static selabel_initfunc initfuncs[] = {
CONFIG_FILE_BACKEND(selabel_file_init),
CONFIG_MEDIA_BACKEND(selabel_media_init),
CONFIG_X_BACKEND(selabel_x_init),
CONFIG_DB_BACKEND(selabel_db_init),
CONFIG_ANDROID_BACKEND(selabel_property_init),
CONFIG_ANDROID_BACKEND(selabel_service_init),
};
//external/selinux/libselinux/src/label_file.c
int selabel_file_init(struct selabel_handle *rec,
const struct selinux_opt *opts,
unsigned nopts)
{
struct saved_data *data;
data = (struct saved_data *)malloc(sizeof(*data));
if (!data)
return -1;
memset(data, 0, sizeof(*data));
rec->data = data;
rec->func_close = &closef;
rec->func_stats = &stats;
rec->func_lookup = &lookup;
rec->func_partial_match = &partial_match;
rec->func_hash_all_partial_matches = &hash_all_partial_matches;
rec->func_lookup_best_match = &lookup_best_match;
rec->func_cmp = &cmp;
//调用init进行data的初始化
return init(rec, opts, nopts);
}
//init会解析/file_context文件的内容,将相关信息填充到入参rec的data成员中。
//填充过程会分为两次进行,第一次是计算安全上下文信息数量(spec_t的数量)及处理一些认证工作。
//第二次会依次关联安全上下文信息(spec_t)和根文件名信息(stem_t),保存regex信息和context信息和确保没有重复的安全上下文信息(spec_t)。
//这些安全上下文信息(spec_t)会被保存在数组data->spec_arr中,根文件信息(stem_t)会被保存在数组data->stem_arr中。
static int init(struct selabel_handle *rec, const struct selinux_opt *opts,
unsigned n)
{
struct saved_data *data = (struct saved_data *)rec->data;
size_t num_paths = 0;
char **path = NULL;
const char *prefix = NULL;
int status = -1;
size_t i;
bool baseonly = false;
bool path_provided;
/* Process arguments */
//这里n为1,进入到case SELABEL_OPT_PATH的逻辑中,使得path为"/file_contexts"
i = n;
while (i--)
switch(opts[i].type) {
case SELABEL_OPT_PATH:
num_paths++;
break;
case SELABEL_OPT_SUBSET:
prefix = opts[i].value;
break;
case SELABEL_OPT_BASEONLY:
baseonly = !!opts[i].value;
break;
}
.....
/*
* Do detailed validation of the input and fill the spec array
*/
for (i = 0; i < num_paths; i++) {
//解析文件
status = process_file(rec->spec_files[i], NULL, rec, prefix, rec->digest);
if (status)
goto finish;
if (rec->validating) {
status = nodups_specs(data, rec->spec_files[i]);
if (status)
goto finish;
}
}
if (!baseonly) {
status = process_file(rec->spec_files[0], "homedirs", rec, prefix,
rec->digest);
if (status && errno != ENOENT)
goto finish;
status = process_file(rec->spec_files[0], "local", rec, prefix,
rec->digest);
if (status && errno != ENOENT)
goto finish;
}
digest_gen_hash(rec->digest);
status = sort_specs(data);
finish:
if (status)
closef(rec);
return status;
}
static int process_file(const char *path, const char *suffix,
struct selabel_handle *rec,
const char *prefix, struct selabel_digest *digest)
{
int rc;
unsigned int i;
struct stat sb;
FILE *fp = NULL;
char found_path[PATH_MAX];
/*
* On the first pass open the newest modified file. If it fails to
* process, then the second pass shall open the oldest file. If both
* passes fail, then it's a fatal error.
*/
for (i = 0; i < 2; i++) {
fp = open_file(path, suffix, found_path, sizeof(found_path),
&sb, i > 0);
if (fp == NULL)
return -1;
//调用process_text_file解析文件内容
rc = fcontext_is_binary(fp) ?
load_mmap(fp, sb.st_size, rec, found_path) :
process_text_file(fp, prefix, rec, found_path);
if (!rc)
rc = digest_add_specfile(digest, fp, NULL, sb.st_size,
found_path);
fclose(fp);
if (!rc)
return 0;
}
return -1;
}
static int process_text_file(FILE *fp, const char *prefix,
struct selabel_handle *rec, const char *path)
{
int rc;
size_t line_len;
unsigned int lineno = 0;
char *line_buf = NULL;
while (getline(&line_buf, &line_len, fp) > 0) {
//解析每行内容
rc = process_line(rec, path, prefix, line_buf, ++lineno);
if (rc)
goto out;
}
rc = 0;
out:
free(line_buf);
return rc;
}
3.4.5.2. SelinuxRestoreContext流程
此处selinux初始化这块流程内容较复杂,后续再详细梳理代码,此处只大致梳理流程
system/core/init/init.cpp - SecondStageMain
---> system/core/init/selinux.cpp - SelinuxRestoreContext()多次调用selinux_android_restorecon入参一系列目录(比如"/dev/__properties__"、"/dev/kmsg"等)
---> external/selinux/libselinux/src/android/android_platform.c - selinux_android_restorecon
---> selinux_android_restorecon_common
---> restorecon_sb 将安全上下文恢复
---> pkgdir_selabel_lookup 获取app文件的安全上下文信息,保存在secontext中(即seapp_contexts用于为应用进程和/data/data目录的上下文文件)
---> seapp_context_lookup 根据UID,isSystemServer,seinfo,pkgname等信息匹配/seapp_contexts的规则,完全符合的项会被用来设置新的context_t,保存在最后一个入参ctx中。seinfo就是“platform”或“android”,根据apk是否拥有系统签名而定
3.4.6. Step 3:信号处理
InstallSignalFdHandler函数用于设置子进程信号处理函数。主要防止init进程的子进程成为僵尸进程(zombie process),为了防止僵尸进程出现,系统会在子进程暂停和终止的时候发出SIGCHLD信号,InstallSignalFdHandler函数就是用来接收SIGCHLD 信号的(内部只处理进程终止的SIGCHLD 信号)。
假设init进程的某个子进程终止了,InstallSignalFdHandler函数调用HandleSignalFd函数,层层调用处理,找到终止的子进程服务并移除它。再重启子进程服务的启动脚本中带有onrestart的服务。
PS:
- EPOLL类似于POLL,是Linux中用来做事件触发的,跟EventBus功能差不多。linux很长的时间都在使用select来做事件触发,它是通过轮询来处理的,轮询的fd数目越多,自然耗时越多,对于大量的描述符处理,EPOLL更有优势
- 在Unix系统中,当一个子进程终止时,父进程会收到一个SIGCHLD信号。SIGCHLD是子进程状态改变时发送给父进程的信号。父进程是通过捕捉SIGCHLD信号来得知子进程运行结束的情况,并通过调用wait()或waitpid()等函数来获取子进程的退出状态、终止原因等信息。InstallSignalFdHandler函数的作用就是,接收到SIGCHLD信号时触发HandleSignalFd进行信号处理
- init进程如何处理这个SIGCHLD信号:
-
- 新建一个sigaction结构体,sa_handler是信号处理函数,指向内核指定的函数指针SIG_DFL和Android 9.0及之前的版本不同,这里不再通过socket的读写句柄进行接收信号,改成了内核的信号处理函数SIG_DFL。
-
- 然后,sigaction(SIGCHLD, &act, nullptr) 这个是建立信号绑定关系,也就是说当监听到SIGCHLD信号时,由act这个sigaction结构体处理
-
- 最后,RegisterHandler 的作用就是signal_read_fd(之前的s[1])收到信号,触发handle_signal
-
system/core/init/init.cpp - SecondStageMain
---> InstallSignalFdHandler
(1) ---> system/core/init/epoll.cpp - RegisterHandler 信号注册,把fd句柄加入到 epoll_fd_的监听队列中(epoll_ctl)
(2) ---> system/core/init/init.cpp - HandleSignalFd 监控SIGCHLD信号,调用ReapAnyOutstandingChildren来终止出现问题的子进程
---> system/core/init/sigchld_handler.cpp - ReapAnyOutstandingChildren
---> system/core/init/sigchld_handler.cpp - ReapOneProcess 是最终的处理函数,这个函数先用waitpid找出挂掉进程的pid,然后根据pid找到对应Service,最后调用Service的Reap方法清除资源,根据进程对应的类型,决定是否重启机器或重启进程
//system/core/init/init.cpp
int SecondStageMain(int argc, char** argv) {
.....
//-----Step 3: 创建epoll句柄并初始化子进程终止信号处理函数
//要是创建handler处理子进程终止信号,注册一个signal到epoll进行监听,进行子继承处理
Epoll epoll;
if (auto result = epoll.Open(); !result) {
PLOG(FATAL) << result.error();
}
//子进程信号处理函数,如果紫禁城异常退出,init进程会调用该函数设定的信号处理函数进行处理
InstallSignalFdHandler(&epoll);
.....
}
static void InstallSignalFdHandler(Epoll* epoll) {
//新建一个sigaction结构体,sa_handler是信号处理函数
const struct sigaction act { .sa_handler = SIG_DFL, .sa_flags = SA_NOCLDSTOP };
//建立信号绑定关系,也就是说当监听到SIGCHLD信号时,由act这个sigaction结构体处理
sigaction(SIGCHLD, &act, nullptr);
sigset_t mask;
sigemptyset(&mask);
sigaddset(&mask, SIGCHLD);
......
// Register a handler to unblock signals in the child processes.
//注册处理程序以解除对子进程中的信号的阻止
const int result = pthread_atfork(nullptr, nullptr, &UnblockSignals);
if (result != 0) {
LOG(FATAL) << "Failed to register a fork handler: " << strerror(result);
}
//创建信号句柄
signal_fd = signalfd(-1, &mask, SFD_CLOEXEC);
if (signal_fd == -1) {
PLOG(FATAL) << "failed to create signalfd";
}
//信号注册,当signal_fd收到信号时,触发HandleSignalFd
if (auto result = epoll->RegisterHandler(signal_fd, HandleSignalFd); !result) {
LOG(FATAL) << result.error();
}
}
3.4.7. Step 4:加载开机默认属性配置以及启动属性服务(继Step 1)
这部分接Step 1 property_init初始化系统之后,通过property_load_boot_defaults加载开机默认属性配置,通过StartPropertyService启动属性服务
3.4.7.1. 流程梳理
system/core/init/init.cpp - property_load_boot_defaults
---> 1.system/core/init/property_service.cpp - property_load_boot_defaults
---> 1.1 通过调用load_properties_from_file加载各个目录下的属性文件,入参prop文件,以及properties键值对变量
---> LoadProperties加载属性,将prop文件的属性遍历写到properties键值对变量中
---> 1.2 遍历properties,对每个属性调用PropertySet方法存入属性到系统中
---> 最终调用到bionic/libc库的Update/Add方法(__system_property_update更新/__system_property_add新增)
---> 1.3 调用property_initialize_ro_product_props初始化ro.product.属性(遍历调用PropertySet)
---> 1.4 调用property_derive_build_fingerprint设置编译相关属性(遍历调用PropertySet)
---> 1.5 调用update_sys_usb_config设置usb属性persist.sys.usb.config(调用property_set常规设置属性方法)
---> 2.system/core/init/property_service.cpp - StartPropertyService
---> 2.1 调用CreateSocket & listen,创建property_service的socket连接,监听系统属性请求
---> 2.2 handle_property_set_fd
---> HandlePropertySet
---> PropertySet
(同上)---> 最终调用到bionic/libc库的Update/Add方法(__system_property_update更新/__system_property_add新增)
3.4.7.2. property_load_boot_defaults
该方法从多个属性文件.prop中系统属性加载至properties变量,再通过PropertySet()将properties添加到系统中,并初始化只读、编译、usb相关属性值
//system/core/init/property_service.cpp
//入参load_debug_prop=false
void property_load_boot_defaults(bool load_debug_prop) {
std::map<std::string, std::string> properties;
//加载各个目录下的属性文件到properties对象中
//此处一般是加载/default.prop
if (!load_properties_from_file("/system/etc/prop.default", nullptr, &properties)) {
// Try recovery path
if (!load_properties_from_file("/prop.default", nullptr, &properties)) {
// Try legacy path
load_properties_from_file("/default.prop", nullptr, &properties);
}
}
load_properties_from_file("/system/build.prop", nullptr, &properties);
load_properties_from_file("/vendor/default.prop", nullptr, &properties);
load_properties_from_file("/vendor/build.prop", nullptr, &properties);
if (SelinuxGetVendorAndroidVersion() >= __ANDROID_API_Q__) {
//Android 10版本以上加载该prop文件
load_properties_from_file("/odm/etc/build.prop", nullptr, &properties);
} else {
load_properties_from_file("/odm/default.prop", nullptr, &properties);
load_properties_from_file("/odm/build.prop", nullptr, &properties);
}
load_properties_from_file("/product/build.prop", nullptr, &properties);
load_properties_from_file("/product_services/build.prop", nullptr, &properties);
load_properties_from_file("/factory/factory.prop", "ro.*", &properties);
....
//将properties中属性通过PropertySet存入属性
for (const auto& [name, value] : properties) {
std::string error;
if (PropertySet(name, value, &error) != PROP_SUCCESS) {
LOG(ERROR) << "Could not set '" << name << "' to '" << value
<< "' while loading .prop files" << error;
}
}
//初始化ro_product前缀的只读属性
property_initialize_ro_product_props();
//初始化编译相关属性
property_derive_build_fingerprint();
//设置persist.sys.usb.config属性,用于控制USB调试和文件传输功能(比如值为adb)
update_sys_usb_config();
}
3.4.7.3. StartPropertyService
//system/core/init/property_service.cpp
void StartPropertyService(Epoll* epoll) {
selinux_callback cb;
cb.func_audit = SelinuxAuditCallback;
selinux_set_callback(SELINUX_CB_AUDIT, cb);
property_set("ro.property_service.version", "2");
//创建PROP_SERVICE_NAME("property_service") socket连接,用于监听系统属性的请求
property_set_fd = CreateSocket(PROP_SERVICE_NAME, SOCK_STREAM | SOCK_CLOEXEC | SOCK_NONBLOCK,
false, 0666, 0, 0, nullptr);
if (property_set_fd == -1) {
PLOG(FATAL) << "start_property_service socket creation failed";
}
//设置Socket连接数为8
listen(property_set_fd, 8);
//注册epoll,监听property_set_fd改变时调用handle_property_set_fd
if (auto result = epoll->RegisterHandler(property_set_fd, handle_property_set_fd); !result) {
PLOG(FATAL) << result.error();
}
}
static void handle_property_set_fd() {
.....
switch (cmd) {
case PROP_MSG_SETPROP: {
.....
//设置属性
uint32_t result =
HandlePropertySet(prop_name, prop_value, socket.source_context(), cr, &error);
if (result != PROP_SUCCESS) {
LOG(ERROR) << "Unable to set property '" << prop_name << "' to '" << prop_value
<< "' from uid:" << cr.uid << " gid:" << cr.gid << " pid:" << cr.pid << ": "
<< error;
}
break;
}
case PROP_MSG_SETPROP2: {
.....
//设置属性
uint32_t result = HandlePropertySet(name, value, socket.source_context(), cr, &error);
if (result != PROP_SUCCESS) {
LOG(ERROR) << "Unable to set property '" << name << "' to '" << value
<< "' from uid:" << cr.uid << " gid:" << cr.gid << " pid:" << cr.pid << ": "
<< error;
}
socket.SendUint32(result);
break;
}
....
}
}
uint32_t HandlePropertySet(const std::string& name, const std::string& value,
const std::string& source_context, const ucred& cr, std::string* error) {
//检查prop权限
//1.检查属性名称是否正确:1、属性名长度需不小于1;2、开头与结尾不能为.;3、字符:0~9+a~z+A~Z+'.'+'@'+'-'+'_'+':'
//2.检查ctl控制属性selinux权限
//3.检查selinux权限,property_service对该属性是否有set权限
if (auto ret = CheckPermissions(name, value, source_context, cr, error); ret != PROP_SUCCESS) {
return ret;
}
.....
//设置属性
return PropertySet(name, value, error);
}
static uint32_t PropertySet(const std::string& name, const std::string& value, std::string* error) {
size_t valuelen = value.size();
//检测属性合法性
if (!IsLegalPropertyName(name)) {
*error = "Illegal property name";
return PROP_ERROR_INVALID_NAME;
}
//不是ro的属性的值不能超过92
if (valuelen >= PROP_VALUE_MAX && !StartsWith(name, "ro.")) {
*error = "Property value too long";
return PROP_ERROR_INVALID_VALUE;
}
.....
//检测属性是否已存在
prop_info* pi = (prop_info*) __system_property_find(name.c_str());
if (pi != nullptr) {
// ro.* properties are actually "write-once".
if (StartsWith(name, "ro.")) {
*error = "Read-only property was already set";
return PROP_ERROR_READ_ONLY_PROPERTY;
}
//1. 属性已存在,并且非ro只读属性,更新属性值
__system_property_update(pi, value.c_str(), valuelen);
} else {
//2. 属性不存在,添加属性值
int rc = __system_property_add(name.c_str(), name.size(), value.c_str(), valuelen);
if (rc < 0) {
*error = "__system_property_add failed";
return PROP_ERROR_SET_FAILED;
}
}
//避免在load所有属性之前将属性写入disk,防止属性值被覆盖。
if (persistent_properties_loaded && StartsWith(name, "persist.")) {
WritePersistentProperty(name, value);
}
//特殊属性值(如sys.powerctl)改变后系统需要立即处理
property_changed(name, value);
return PROP_SUCCESS;
}
此处比较重要的两个方法就是,这两个方法最终调用到bionic/libc/system_properties/system_properties.cpp的Update/Add方法(此处不再往下标准库详细梳理):
__system_property_update:更新属性值__system_property_add:添加属性值
//bionic/libc/bionic/system_property_api.cpp
static SystemProperties system_properties;
int __system_property_update(prop_info* pi, const char* value, unsigned int len) {
return system_properties.Update(pi, value, len);//更新属性值
}
int __system_property_add(const char* name, unsigned int namelen, const char* value,
unsigned int valuelen) {
return system_properties.Add(name, namelen, value, valuelen);//添加属性值
}
3.4.8. Step 5:解析init.rc等文件,由action触发运行rc文件
在下一篇详细梳理init.rc及其他目录rc的启动,此处简单说明下加载和触发。
整体流程:
- 解析/init.rc,然后递归地解析它的每个导入(此处递归是import的递归,不是文件夹的递归,文件夹不支持递归);
- 解析/system/etc/init/目录的内容,按字母顺序排列并按顺序解析,在每个文件解析后递归地进行导入;
- 步骤2重复/vendor/etc/init
- 通过action机制触发器执行rc文件,从代码中看执行顺序是:”on early-init” -> “on init” -> “on late-init”
3.4.8.1. 代码说明
//system/core/init/init.cpp
int SecondStageMain(int argc, char** argv) {
.....
//-----Step 5: 解析init.rc等文件,建立rc文件的action 、service,启动其他进程
ActionManager& am = ActionManager::GetInstance();
ServiceList& sm = ServiceList::GetInstance();
LoadBootScripts(am, sm);
...
//Action机制,添加action
// 执行rc文件中触发器为 on early-init 的语句
am.QueueEventTrigger("early-init");
.....
// Trigger all the boot actions to get us started.
//执行rc文件中触发器为on init的语句
am.QueueEventTrigger("init");
.....
//正常情况该属性值是normal,执行on late-init
std::string bootmode = GetProperty("ro.bootmode", "");
if (bootmode == "charger") {
am.QueueEventTrigger("charger");
} else {
am.QueueEventTrigger("late-init");
}
....
while (true) {
......
//依次执行每个action中携带command对应的执行函数
if (!(waiting_for_prop || Service::is_exec_service_running())) {
am.ExecuteOneCommand();
}
.....
}
}
static void LoadBootScripts(ActionManager& action_manager, ServiceList& service_list) {
//创建Parser解析对象,例如service、on、import对象
Parser parser = CreateParser(action_manager, service_list);
//bootscript为空
std::string bootscript = GetProperty("ro.boot.init_rc", "");
//主要解析三个部分的rc文件:
//1.根目录/init.rc (一般车机根目录其他的rc文件都会在init.rc中使用import导入加载)
//2./system/etc/init
//3./vendor/etc/init
if (bootscript.empty()) {
//通过ParseConfig然后调用ParseConfigFile()解析(代码:system/core/init/parser.cpp)
//ParseConfig 函数传入需要解析的rc文件的路径:
// 1. 如果是目录,则遍历该目录取出所有的rc文件并调用ParseConfigFile函数进行解析
// 2. 如果是文件路径,则直接调用 ParseConfigFile 函数进行解析。
//init解析rc文件的过程中,首先调用ReadFile函数将rc文件的内容全部保存为字符串,存在data中,
//然后调用ParseData进行解析。ParseData函数会根据关键字解析出service和action,最终挂在到service_list与action_manager 的向量(vector)上
parser.ParseConfig("/init.rc");
if (!parser.ParseConfig("/system/etc/init")) {
late_import_paths.emplace_back("/system/etc/init");
}
if (!parser.ParseConfig("/product/etc/init")) {
late_import_paths.emplace_back("/product/etc/init");
}
if (!parser.ParseConfig("/product_services/etc/init")) {
late_import_paths.emplace_back("/product_services/etc/init");
}
if (!parser.ParseConfig("/odm/etc/init")) {
late_import_paths.emplace_back("/odm/etc/init");
}
if (!parser.ParseConfig("/vendor/etc/init")) {
late_import_paths.emplace_back("/vendor/etc/init");
}
} else {
parser.ParseConfig(bootscript);
}
}
Parser CreateParser(ActionManager& action_manager, ServiceList& service_list) {
Parser parser;
parser.AddSectionParser("service", std::make_unique<ServiceParser>(&service_list, subcontexts));
parser.AddSectionParser("on", std::make_unique<ActionParser>(&action_manager, subcontexts));
parser.AddSectionParser("import", std::make_unique<ImportParser>(&parser));
return parser;
}
4. 总结
本篇主要讲述init进程的启动,以及init进程启动过程的主要工作内容,这部分主要还是集中在init进程中。下一步开始梳理init.rc及其他目录rc文件的触发执行,将会开始扩散到各个子进程中。
5. 参考
- Android init进程
- Android 9(P)之init进程启动源码分析指南之一
- init进程启动过程
- Android zygote和SystemServer进程
- 安卓11 init初始化以及init.rc的解析执行过程详解
- Android init 启动进程分析
- Kernel怎么跳转到Android:linux与安卓的交界
- 一文了解Linux下2号进程的kthreadd
- Android进程管理1—进程优先级adj
- Android直接从init产生进程 安卓系统init进程号
- Android O 启动过程init log,和遇到问题
- 安卓FirstStageMount阶段解析【连载】(一)创建设备Create
- Sec-comp机制简介及编程案例
- SEAndroid安全机制框架分析
- Android selinux策略文件的编译与加载
- epoll详解
Leave a comment